Goodrive350 series high-performance multi-function inverter Chapter 6
-208-
Detailed parameter description
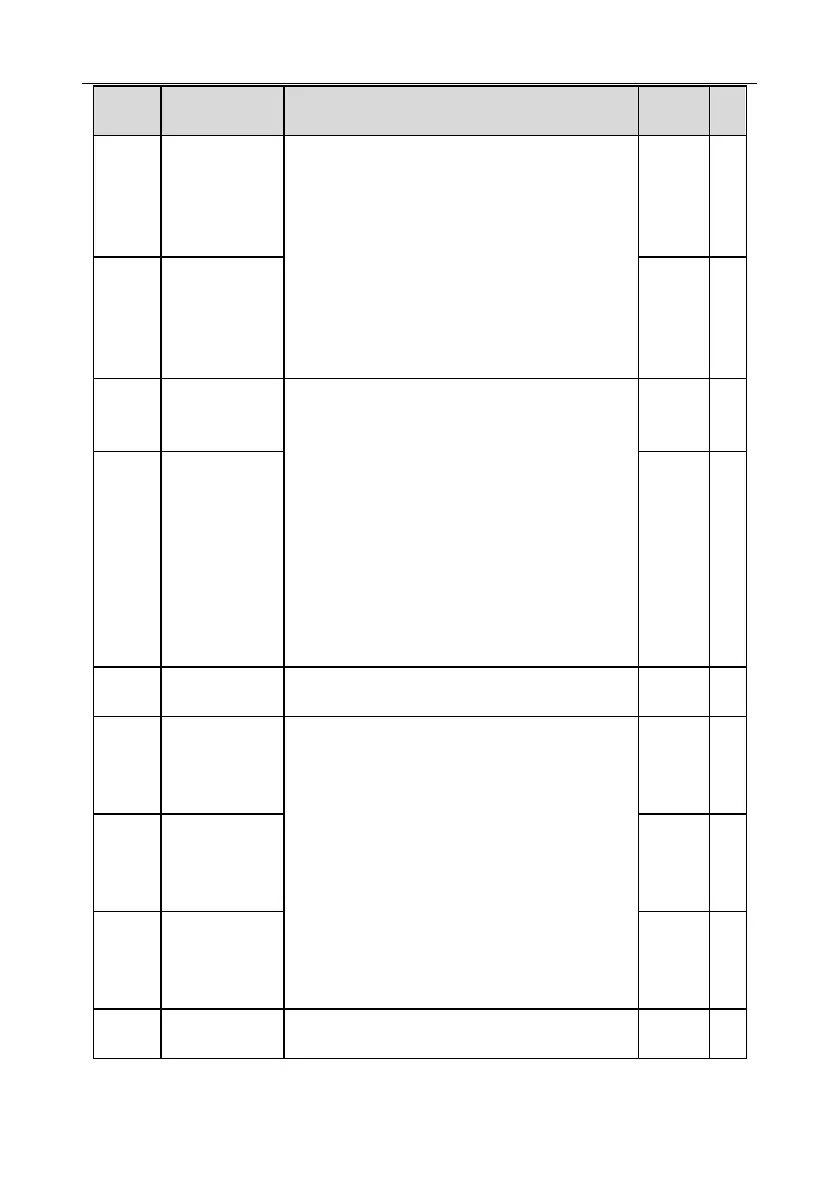
Slip
compensation
coefficient of
vector control
(motoring)
Slip compensation coefficient is used to adjust the
slip frequency of vector control to improve system
speed control precision. Users can effectively control
the static error of speed by adjusting this parameter
properly.
Setting range: 50–200%
Slip
compensation
coefficient of
vector control
(generating)
Current loop
proportional
coefficient P
Note:
1. These two parameters are used to adjust PI
parameters of current loop; it affects dynamic
response speed and control precision of the system
directly. The default value needs no adjustment
under common conditions;
2. Fit for SVC mode 0 (P00.00=0) and VC mode
(P00.00=3);
3. The value of this function code will be updated
automatically after parameter autotuning of
synchronous motor is done.
Setting range: 0–65535
Current loop
integral
coefficient I
Speed loop
differential gain
Proportional
coefficient of
high-frequency
current loop
Under VC mode (P00.00=3), below current loop
high-frequency switch-over threshold (P23.14),
current loop PI parameters are P23.09 and P23.10;
above current loop high-frequency switch-over
threshold, current loop PI parameters are P23.12
and P23.13.
Setting range of P23.12: 0–20000
Setting range of P23.13: 0–20000
Setting range of P23.14: 0.0–100.0% (relative to
max. frequency)
Integral
coefficient of
high-frequency
current loop
High-frequency
switch-over
threshold of
current loop

 Loading...
Loading...




