65
8 Supplement
8.3 Self-optimization
Principle
Self-optimization (SO) is carried out according to the oscillation
method and establishes the optimum controller parameters for PID or
PI controllers.
Depending on the configured controller type, the following controller
parameters are defined:
Proportional band (Pb), derivative time (dt), reset time (rt), cycle times
(Cy), filter time constant (dF)
Depending on the range of the control deviation, the controller selects
between to methods a or b:
Prerequisites
The following prerequisites must be fulfilled to be able to start self-
optimization:
• No active level inhibit via binary functions (binF)
• No active inhibit of parameter level via setup program
(Display/Operation/Service counter -> Operation -> Level inhibit)
• Ensure that the the + keys are not pressed asynchronously.
Simultaneous actuation must be synchronous.
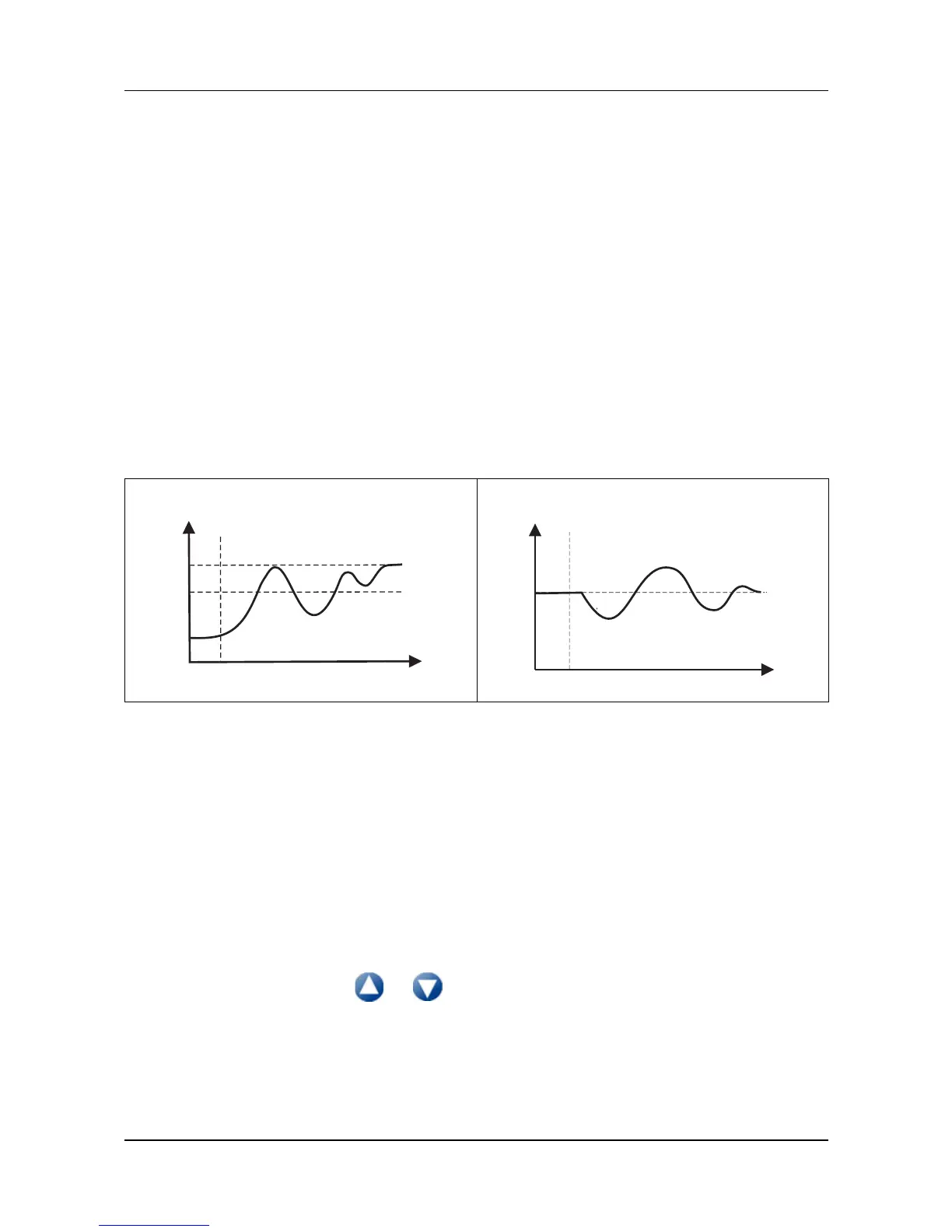
a) SO in start-up phase b) SO at set-point
S = Switching level
T = Start of self-optimization (SO)
t
x
w
T
S
w
x
T
t