25
Parameter conguration
ServoOne User Manual SERCOS II and III
ID no.: 1108.26B.3-00 Date: 04/2020
Parameter conguration
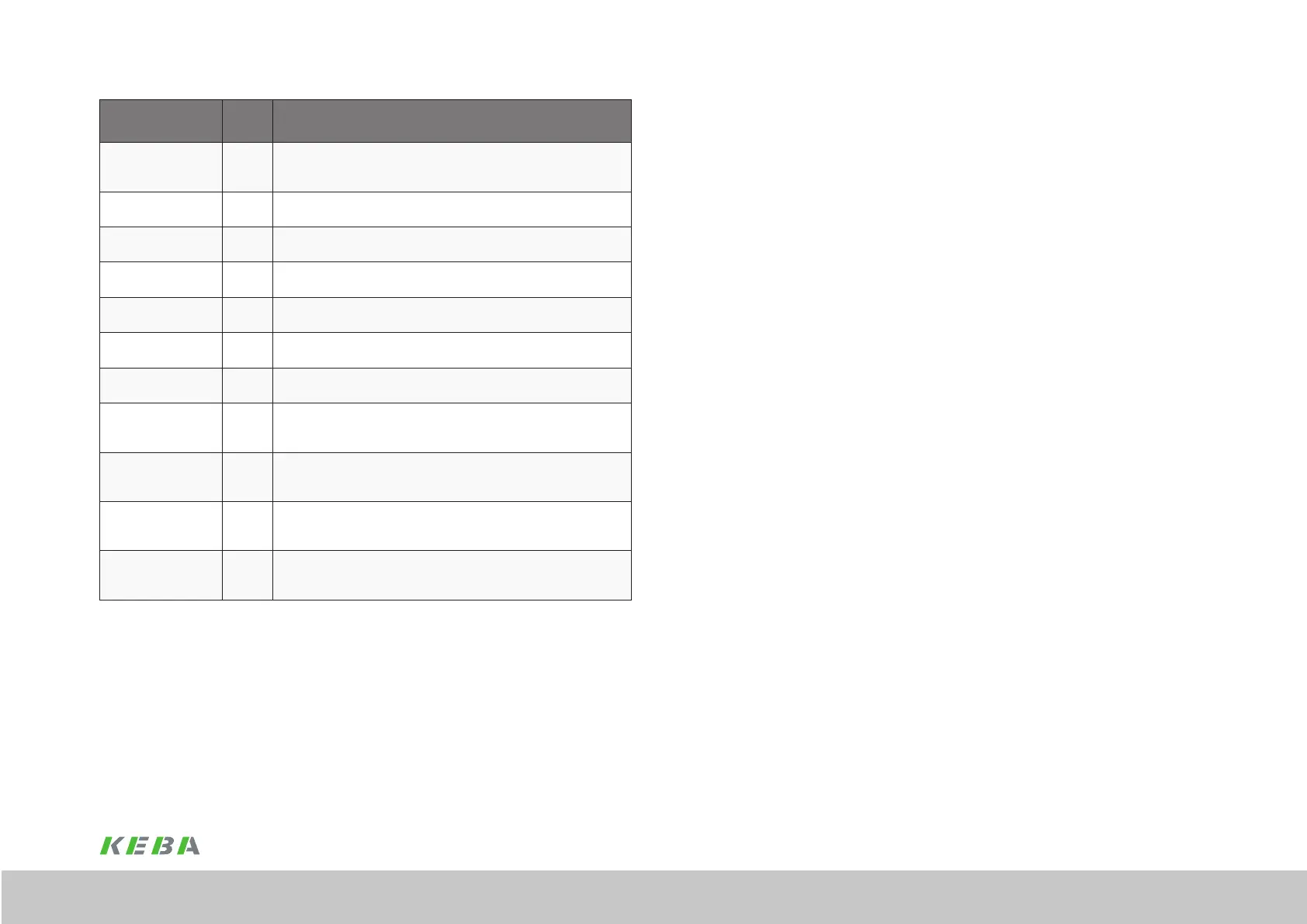
Operation mode
Bit 15 ..... ..... Bit 0
HEX Description
0000 0000 0000 0100 0x0004 Position control with position controller 2 (e.g. external encoder), control-
ler-controlled prole generation, feed forward signals not used, with tracking
error
0000 0000 0000 1011 0x000B Position control with position controller 1 (e.g. motor controller), control-
ler-controlled prole generation, feed forward signals used, no tracking error
0000 0000 0000 1100 0x000C Position control with position controller 2 (e.g. external encoder), control-
ler-controlled prole generation, feed forward signals used, no tracking error
0000 0000 0001 0011 0x0013 Position control with position controller 1 (e.g. motor encoder), drive-controlled
prole generation, feed forward signals not used, with tracking error
0000 0000 0001 0100 0x0014 Position control with position controller 2 (e.g. external encoder), drive-con-
trolled prole generation, feed forward signals not used, with tracking error
0000 0000 0001 1011 0x001B Position control with position controller 1 (e.g. motor encoder), drive-controlled
prole generation, feed forward signals used, no tracking error
0000 0000 0001 1100 0x001C Position control with position controller 2 (e.g. external encoder), drive-con-
trolled prole generation, feed forward signals used, no tracking error
0000 0000 0100 1011 0x004B Position control with position controller 1 (e.g. motor controller), drive-con-
trolled prole generation, feed forward signals used, no tracking error,
synchronous operation ECAM/EGEAR
0000 0000 0100 1100 0x004C Position control with position controller 2 (e.g. external encoder), control-
ler-controlled prole generation, feed forward signals used, no tracking error,
synchronous operation ECAM/EGEAR
0000 0000 0101 1011 0x005B Position control with position controller 1 (e.g. motor controller), drive-con-
trolled prole generation, feed forward signals used, no tracking error,
synchronous operation ECAM/EGEAR
0000 0000 0101 1100 0x005C Position control with position controller 2 (e.g. external encoder), drive-con-
trolled prole generation, feed forward signals used, no tracking error,
synchronous operation ECAM/EGEAR
Table 6.2 Operation modes supported
Up to four different operation modes can be congured with the aid of parameters
S-0-0032.0.0 to S-0-0035.0.0. The operation mode is selected using the parameter
S-0-0134.0.0 "Drive control word" (see “Parameter conguration” on page 23). Here
it is dened which congured operation mode is to be used to operate the drive.
Which of the three possible encoder interfaces on the ServoOne (channel 1, channel
2, channel 3) is to be used as position encoder 1 or position encoder 2 is dened
using parameter P0530 Channel selection SERCOS encoder 1 and P0531 Channel
selection SERCOS encoder 2.
The position encoder for the position control dened by the operation mode must also
be selected via parameter P0522 as the position encoder for the position control.
Otherwise an error will be triggered as a reaction to the controller enable or the
switchover from phase 2 to phase 3.
Please refer to the operation manual for the
ServoOne for more information on the conguration of the encoder.
A valid interpolation method P0370 must be congured in the parameters for the
related position-controlled operation mode. The following settings are possible:
1. Linear interpolation
Calculation of position and speed
2. Spline interpolation with external feed forward control.
This setting should only be used if the controller also calculates and
transfers the feed forward signals for speed P3055 and torque P3056.
3. Spline interpolation
Calculation of position, speed and torque
4. Spline interpolation II
Calculation of position, speed and torque
To achieve a higher resolution for the feed forward signals, an additional 16-bit part
after the decimal separator can be transferred, P3100, for the position (S-0-0047).
To use the higher resolution, the expanded feed forward mode P0379 = 0
(PosHighRes) must be selected.
Even without the calculation of P3100 the expanded feed forward mode can improve
the feed forward signals; this aspect is heavily dependent on the scaling (resolution of
the position) and must be checked on the system in the specic case.
Please refer to the operation manual for the ServoOne for further information on scaling
and interpolation.