45
Scaling and weighting
ServoOne User Manual SERCOS II and III
ID no.: 1108.26B.3-00 Date: 04/2020
Scaling and weighting
8.1.3 Modulo weighting
If modulo weighting is set via S-0-0076 "weighting parameters", the parameter S-0-
0103 "modulo value" and S-0-0294 "modulo value divisor" dene the value range
(modulo range) the position actual value can take. If the travel exceeds the modulo
range, the actual position overows.
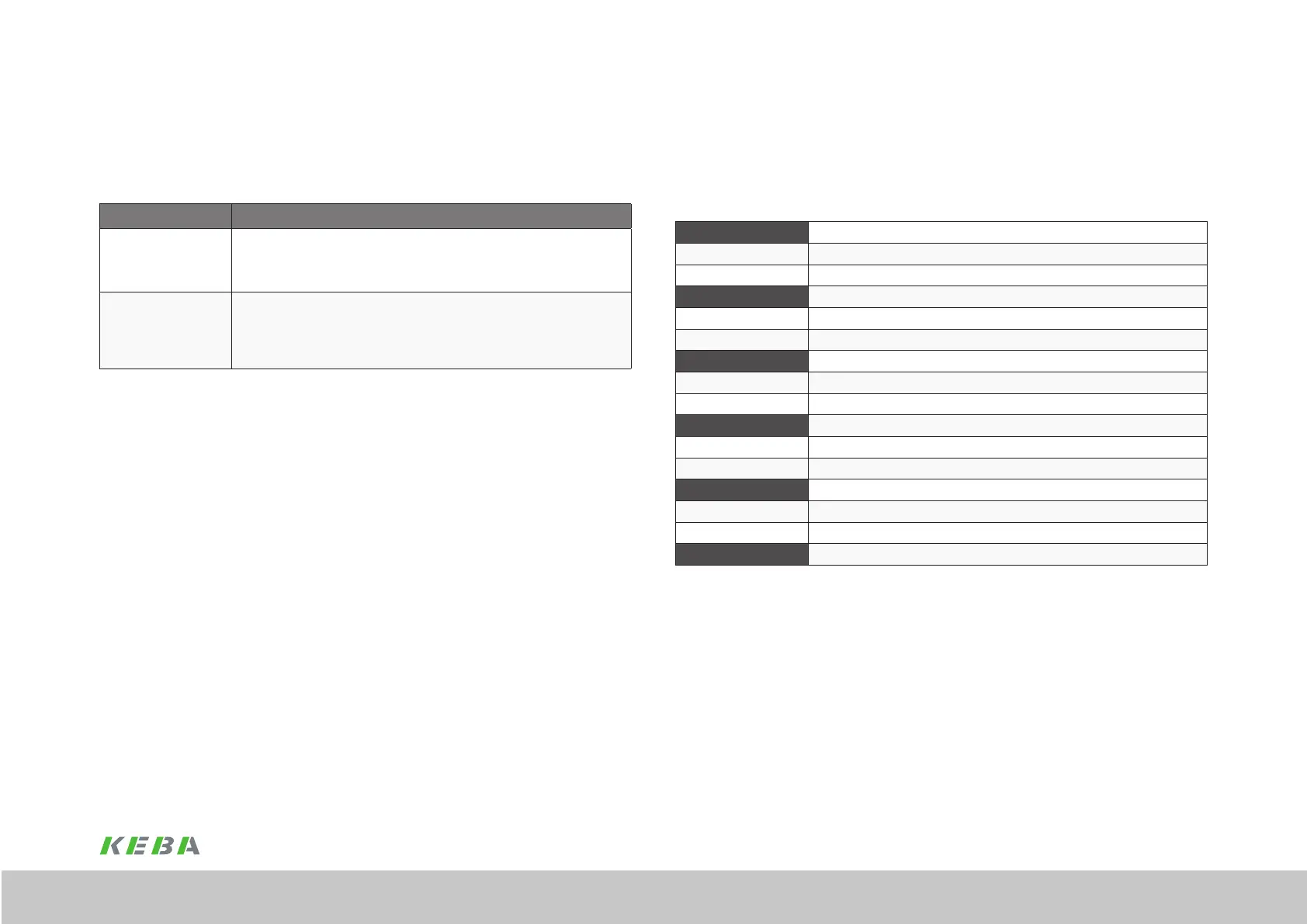
Parameter Description
S-0-0103
Modulo value
If the modulo format is set in the position weighting type (S-0-0076), the modulo value
(S-0-0103) denes the numerical range of all position data. If the modulo value is
exceeded, the drive and the controller undertake the modulo calculation.
S-0-0294
Modulo value divisor
If the modulo value (S-0-0103) does not correspond to the physical modulo value, the
modulo value can be corrected by the divisor S-0-0294.
The effective modulo value is given by the product of S-0-0103 and S-0-0294. A value
of 1 renders the parameter "modulo value divisor" ineffective.
Table 8.5 Scaling parameters for position weighting
8.1.4 Position polarity
The polarities (sign) of the position data stated can be changed in parameter S-0-0055
to suit the application. The polarities are not changed inside a control loop, but outside
(at the input and output).
If the position reference value difference is positive and the polarity is not inverted, the
rotation is clockwise looking at the motor shaft.
Bit 0
Position reference value
0 Not inverted
1 Inverted
Bit 1
Additive position reference value
0 Not inverted
1 Inverted
Bit 2
Position actual value 1
0 Not inverted
1 Inverted
Bit 3
Position actual value 2
0 Not inverted
1 Inverted
Bit 4
Position limit
0 Not inverted
1 Inverted
Bit 5-15
Reserved
Table 8.6 Setting the position polarity via parameter S-0-0055