50
Scaling and weighting
ServoOne User Manual SERCOS II and III
ID no.: 1108.26B.3-00 Date: 04/2020
Scaling and weighting
8.4.3 Weighting of torque data
Torque data weighting is selected via the parameter S-0-0086. The significance of the
LSB for the torque data is defined by the following equation:
Significance LSB = unit · S-0-0093 · 10
S-0-0094
On the selection of torque preferred weighting, the weighting applies according to the
following table.
Weighting type
(from S-0-0086)
Unit
(from S-0-0086)
Weighting factor
(S-0-0093)
Weighting expo-
nent
(S-0-0094)
Preferred weight-
ing
Rotary Nm 1 -2 0.01 Nm
Table 8.18 Preferred weighting of force data
Bit 2-0
Weighting type
0 0 0 No weighting
0 0 1 Translatory weighting
0 1 0 Rotary weighting
Bit 3
Weighting method
0 Preferred weighting
1 Parameter weighting
Bit 4
Distance unit
0 Nm (for rotary weighting) / N (for translatory weighting)
1 In lbf (for rotary weighting) / lbf (for translatory weighting)
Bit 5
Reserved
Bit 6
Data reference
0 At the motor shaft
1 On the load side
Bit 7-17
Reserved
Table 8.19 Bit elds in the parameter weighting type torque/force data (S-0-0086)
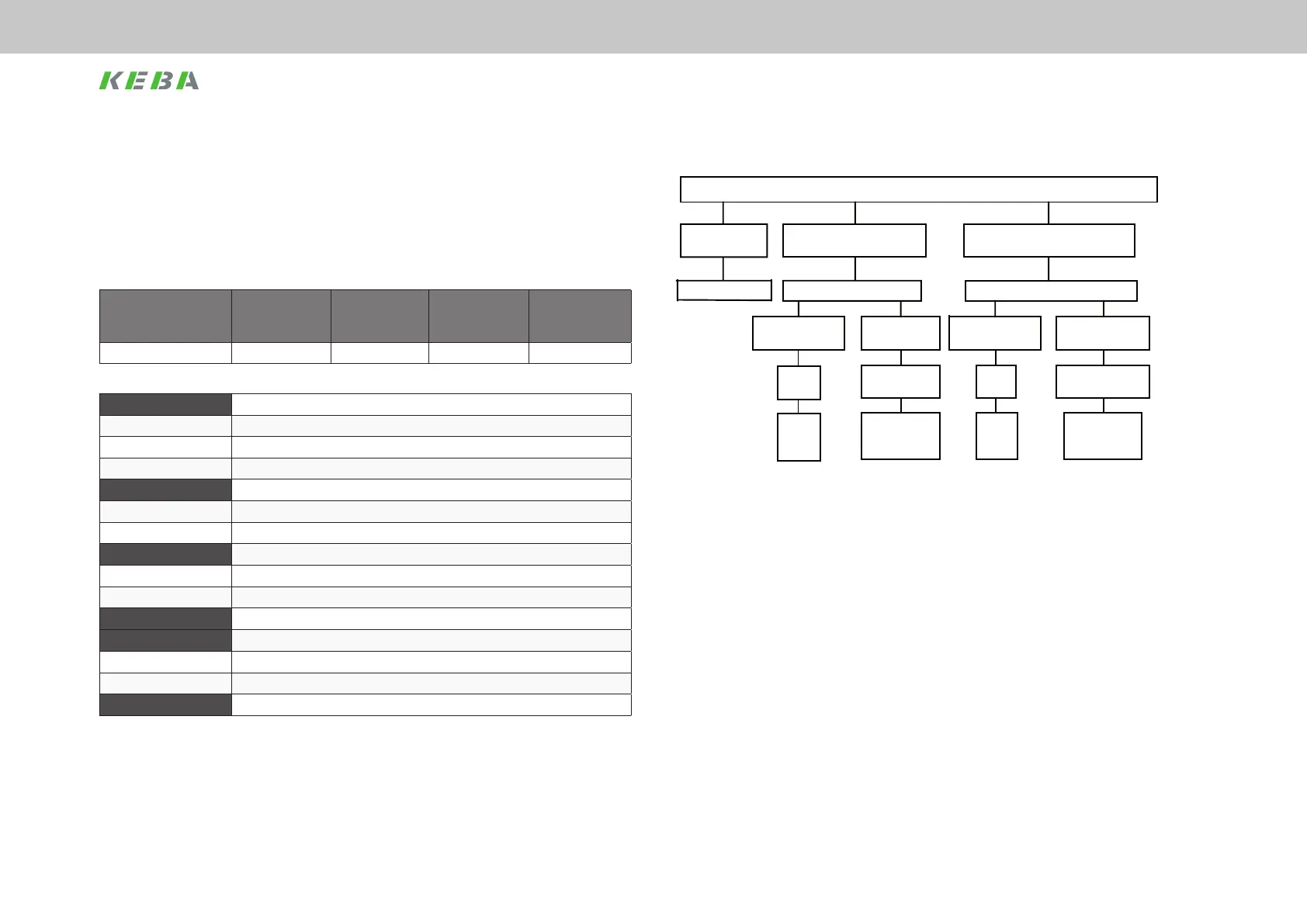
The following figure shows the various possibilities for the torque/force weighting.
Figure 8.4
Nm
Nm
N
N
LSB =
1.0
N
LSB
(S-0-0093)
(S-0-0094)
LSB =
10
-2
Nm
LSB
S-0-0086 Bit 0 – 2
S-0-0086 Bit 6
S-0-0086
Bit 3
S-0-0086
Bit 4
(S-0-0093)
rotary (torque)
translatory (force)
Force data/Torque data weighting type (S-0-0086)
Load/Motor
Parameter
weighting
Load/Motor
percentage
(0.1 %)
variable
Preferred
weighting
Preferred
weighting
Parameter
weighting
Load/Motor
Diagram of the torque/force weighting types
8.4.4 Torque polarity
The polarities (sign) of the torque data stated can be changed in parameter S-0-0085 to
suit the application. The polarities are not changed inside a control loop, but outside (at
the input and output). If the torque reference value difference is positive and the polarity
is not inverted, the rotation is clockwise looking at the motor shaft.