49
Scaling and weighting
ServoOne User Manual SERCOS II and III
ID no.: 1108.26B.3-00 Date: 04/2020
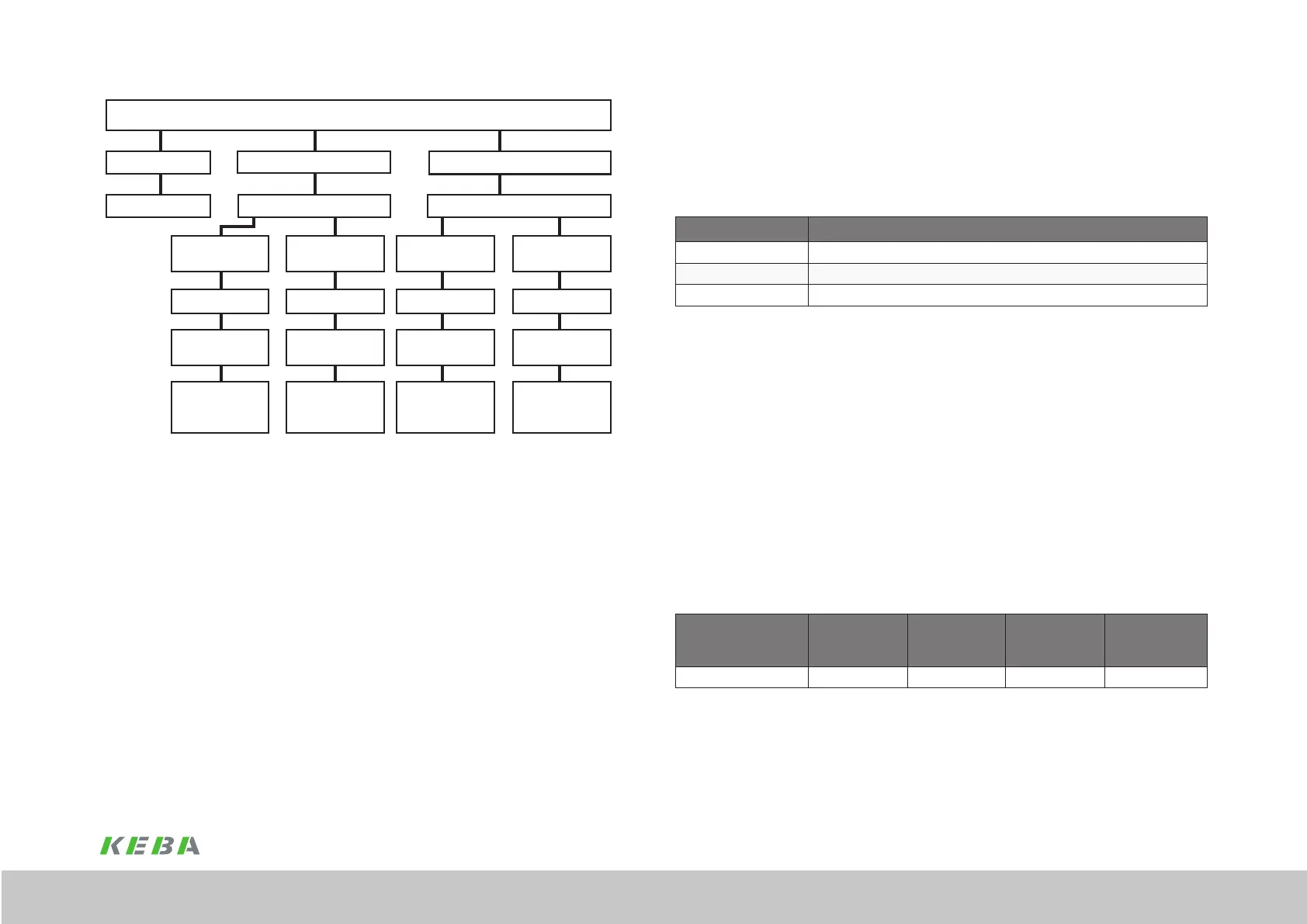
Scaling and weighting
linear
rotational
Load/Motor Load/Motor
Preferred
weighting
Preferred
weighting
Parameter
weighting
Parameter
weighting
s
2
or s
3
s
2
or s
3
s
2
or s
3
s
2
or s
3
Metre
Metre
Radian Radian
LSB = 10
-6
m/s
2(3)
LSB = 10
-3
rad/s
2(3)
Variable
LSB weight
Variable
LSB weight
Accelaration data weighting type (IDN00160)
Load/Motor
none
IDN 00160 Bit 0-2
IDN 00160 Bit 6
Bit 3
Bit 5
Bit 4
(IDN 00161)
(IDN 00161)
Figure 8.3 Diagram of the acceleration weighting types
8.4 Weighting of torque data and force data
The torque/force weighting is dened by the parameters listed in the following table.
This weighting describes the signicance of the LSB and the unit for parameter S-0-
0084 as well as all other torque/force parameters. All drive torque/force data (e.g.:
reference values, actual values and limits) are subject to the weighting set.
IDN Description
S-0-0086 Weighting type for torque/force data
S-0-0093 Weighting factor for torque/force data
S-0-0094 Weighting exponent for torque/force data
Table 8.16 Scaling parameters for torque/force weighting
8.4.1 Percentage weighting of torque data and force data
The percentage weighting is set via the weighting type (S-0-0086). Other parameters
are not required. The continuous permissible motor stall torque (S-0-0111) is used as the
reference value for the percentage weighting. All torque/force data are stated in % with
one decimal place.
8.4.2 Weighting of force data
Force data weighting is selected via the parameter S-0-0086. The significance of the LSB
for the force data is defined by the following equation:
Significance LSB = unit · S-0-0093 · 10
S-0-0094
On the selection of force preferred weighting, the weighting applies according to the
following table.
Weighting type
(from S-0-0086)
Unit
(from S-0-0086)
Weighting factor
(S-0-0093)
Weighting expo-
nent
(S-0-0094)
Preferred weight-
ing
Linear N 1 0 1 N
Table 8.17 Preferred weighting of force data