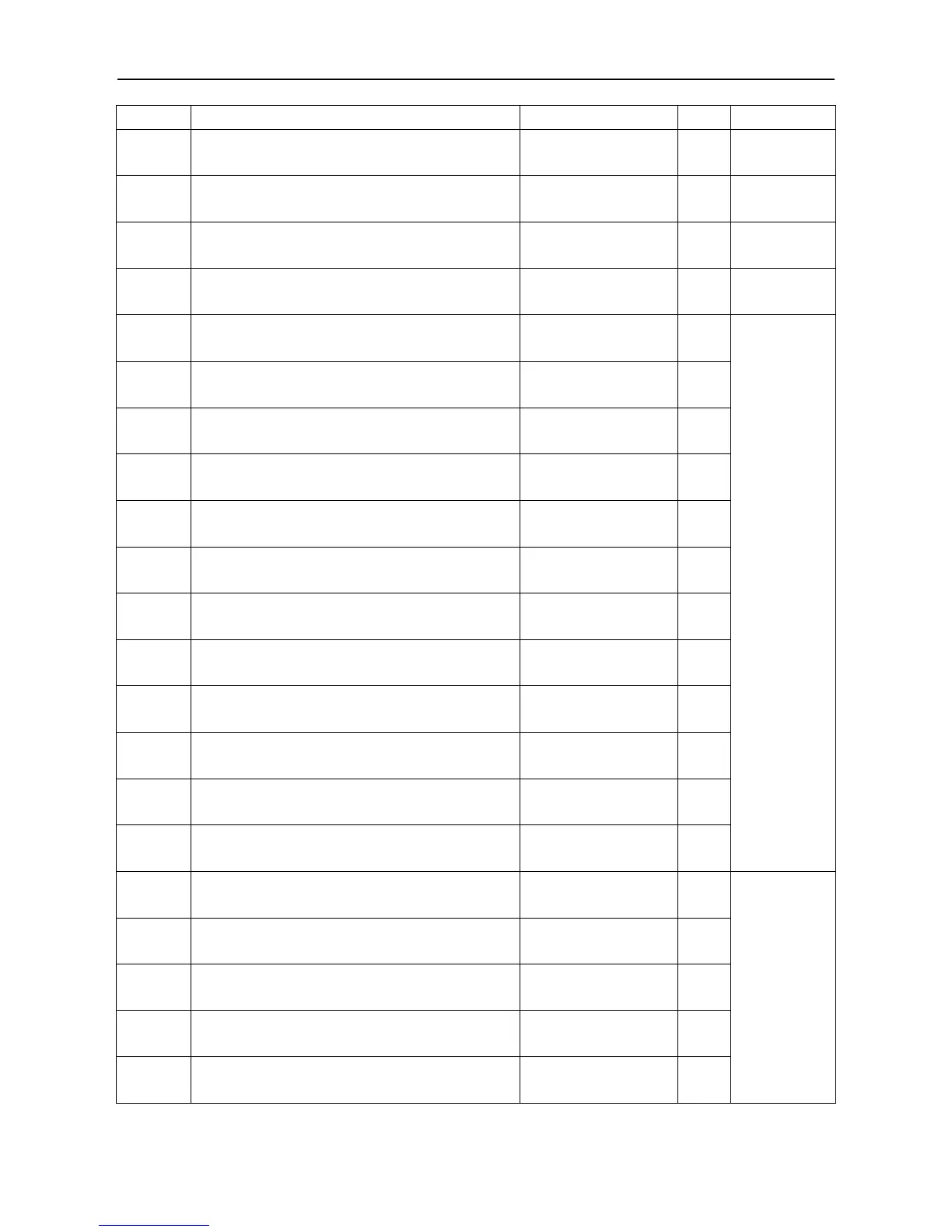
(the 16 bits of the register)
40002 Display the lower 8 bits
( the lower 8 bits of the register)
Y - -
40003 Meter’s status
(the lower 8 bits of the register)
Y - -
40004 DI status
(the lower 8 bits of the register)
Y - -
40005 DO status
(
the lower 4 bits of the register
Y Y -
40006 Hi-hi limit higher 16 bits
(the 16 bits of the register)
Y -
Y
(It must be
continuous
from 06 to
17.)
40007 Hi-hi limit lower 8 bits
(the lower 8 bits of the register)
Y -
40008 Up limit higher 16 bits
(the 16 bits of the register)
Y -
40009 Up limit lower 8 bits
(the lower 8 bits of the register)
Y -
40010 Low limit higher 16 bits
(the 16 bits of the register))
Y -
(the lower 8 bits of the register)
40012 Low-low limit lower 8 bits
(the lower 8 bits of the register)
Y -
40013 Low-low limit lower 8 bits
(the lower 8 bits of the register)
Y -
(the lower 8 bits of the register)
the lower 8 bits of the register
Y Y
40016 Low limit lag
(the lower 8 bits of the register)
Y Y
40017 Low-low limit lag
(the lower 8 bits of the register)
Y Y
40018 The range of zero
(the lower 8 bits of the register)
Y Y
Y
(It must be
continuous
from 18 to
33.)
40019 The range of zero tacking
(the lower 8 bits of the register)
Y Y
40020 Motion detection
(the lower 8 bits of the register)
Y Y
40021 Filtering coefficient
(the lower 8 bits of the register))
Y Y
40022 The display updated ratio
(
the lower 8 bits of the register