Chapter 15 PID Function (Built-in function)
15 - 33
15.4.1 Basic theory of PID auto-tuning
It describes the function of PID auto-tuning.
The performance of PID controller is very different according to P, I, D coefficient. Generally, It is very
difficult and takes long time to predict the system and set P, I, D coefficient because of non-periodical
disturbance, interference of other control loop, dynamic characteristic of control system though the
engineer is good at handling the PID controller. So auto-tuning that sets the PID coefficient
automatically is very useful. Generally, there are many methods in setting the PID coefficient. Here, it
will describe Relay Auto-tuning.
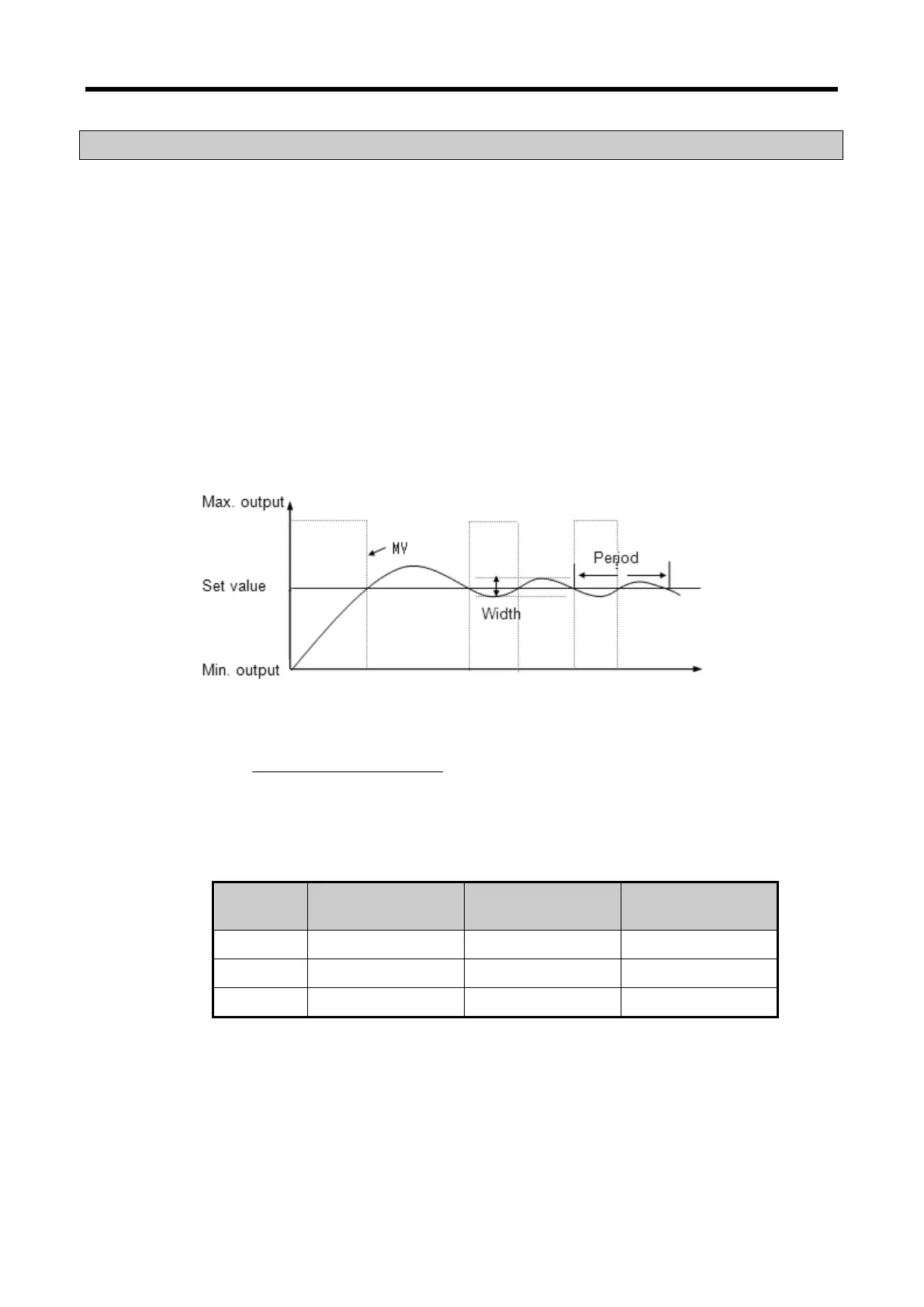
(1) PID coefficient setting by Relay auto-tuning
It makes critical oscillation by force and uses the width and period of oscillation to specify the PID
coefficient. It applies max. output and min. output to control system for auto-tuning. Then,
oscillation with steady period and steady width occurs around the Set value like figure 6.15, and it
can calculate the boundary gain by using it like expression (15.3.1).
< Figure 15.15 Relay auto-tuning >
width
outputMinoutputMax
K
u
). .(4
(15.4.1)
At this time, oscillation period is called boundary period. If boundary gain and period is specified,
use table 15.9, Ziegler & Nichols tuning table to specify the PID coefficient. This Relay tuning is
relatively simple to configure and easy to know the boundary gain and period so it is used
frequently and XGB built-in PID auto-tuning uses this method.
< Table 15.9 Ziegler & Nichols tuning table >