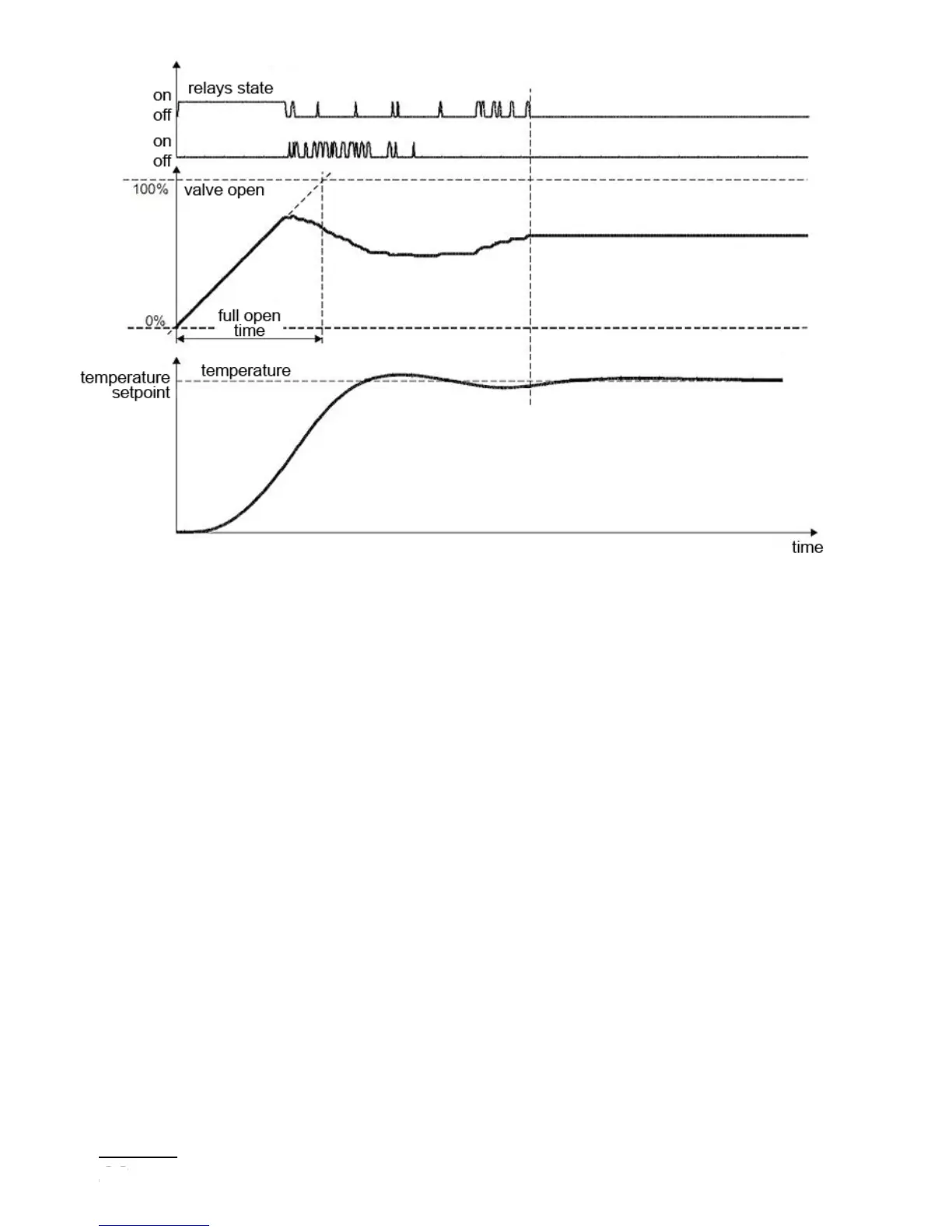
Fig. 18. Three-step step-by-step control with no feedback
The principle of the algorithm shown in Fig.18 is based on conversion
of changing the control signal to the relay opening / closing time referred
to the full opening / closing time.
The differences between the calculated and the actual valve position
are unavoidable because of multiple changes in the direction of valve
movement due to the inertia of a drive or its wear in the absence
of a feedback. The controller uses the function of automatic positioning
of a drive during operation to eliminate these differences. This function
does not require user intervention and its function is to extend switching
on time of the relay when the control signal reaches 0% or 100%.
The relay for opening / closing will remain on for a time equal to the time
of a valve full open / close from a moment of a signal reaching 100% /
0%. The positioning of the valve will be stopped once the signal is diffe-
rent from the maximum value.

 Loading...
Loading...
