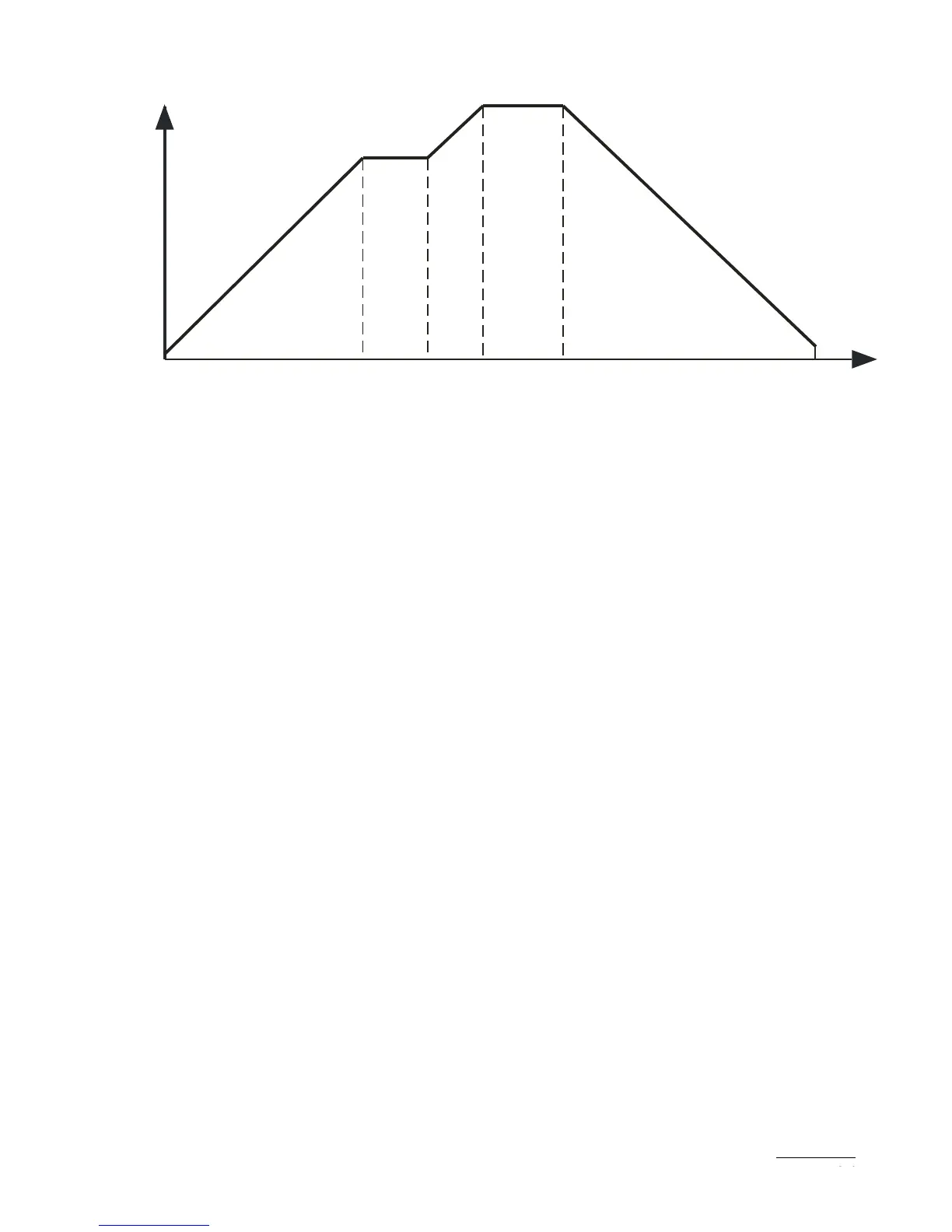
Fig. 20. “Gain Scheduling” switched over for
each segment in the programmed control
8.5. Control of Heating-cooling Type
For the heating-cooling control, one of the outputs out1…out3
should be set to y, one of the outputs out1…out3 should be set to
Cool and the displacement zone Hn for cooling should be confi gured.
For the heating loop, the PID parameters should be confi gured:
pb, ti, td , for the cooling loop the PID parameters: pbC, tiC, tdC.
The parameter pbC is defi ned as the ratio of the pb parameter from the
range 0.1....200.0 %.
The pulse period for logic outputs (relay, SSR) is set independently
for the heating and cooling loops (depending on the output, these are
to1 … to3).
If there is the need to use the PID control in one loop and
the ON-OFF control in the other loop, one output should be set to PID
control and the other one upper relative alarm.
time

 Loading...
Loading...
