Section 4 - Setup and Calibrations
90-8M0120668 eng MARCH 2016 Page 55
EasyLink
Port, Starboard >
Engine and Transmission > Port or Starboard—On—dot, off—no dot
RPM sync > Port or Starboard—On—dot, off—no dot
Fuel tank 1 > Port or Starboard—On—dot, off—no dot
Fuel tank 2 > On—dot, off—no dot
Oil tank > On—dot, off—no dot
Fresh Water > On—dot, off—no dot
Wastewater tank > Gray tank 1, Black tank 1—On—dot, off—no dot
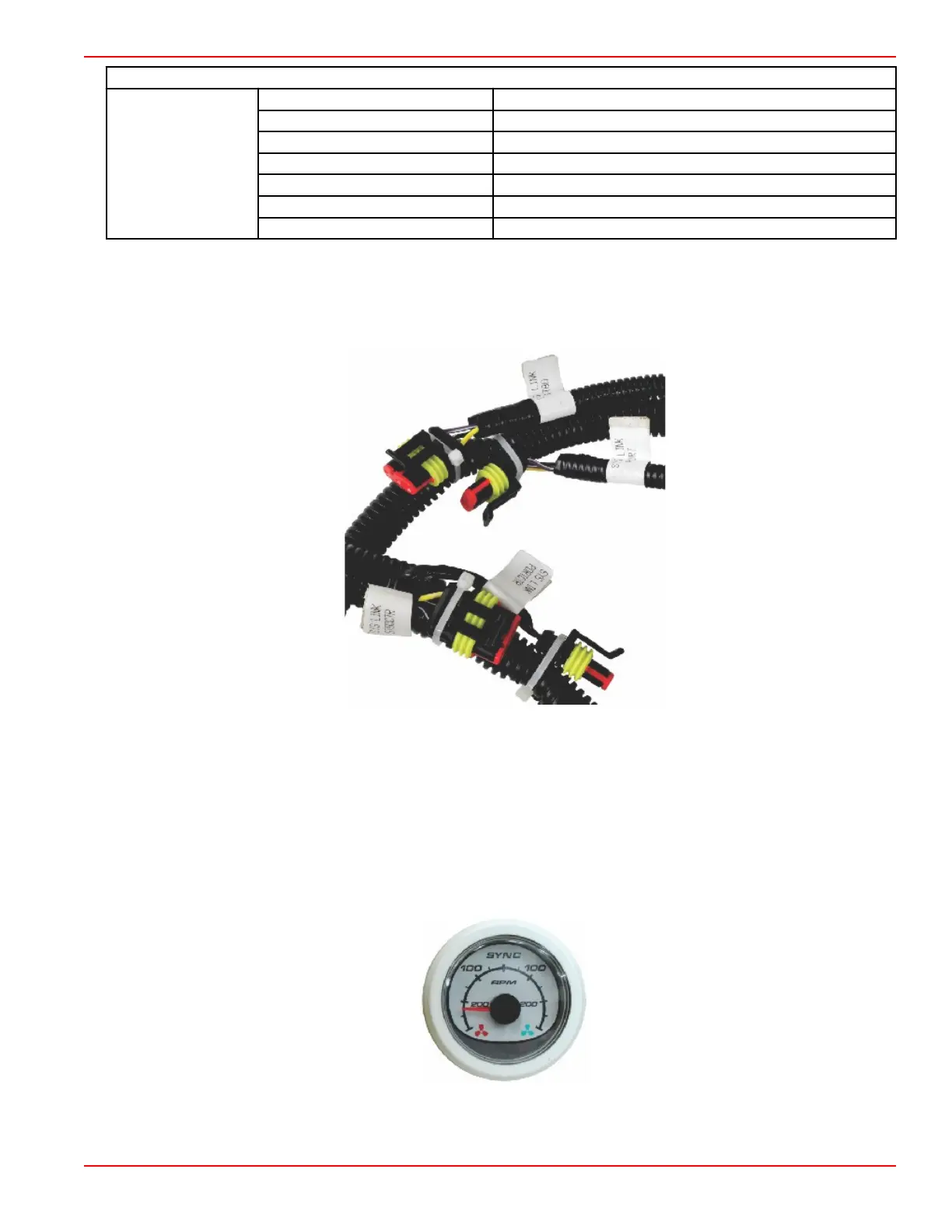
EasyLink settings allow the link gauge connectors on the VesselView harness to be used to transmit data to link gauges at the
helm. Four link gauge connections on the VesselView harness are labeled; SYS LINK STBD and SYS LINK PORT.
The port and starboard link connectors can be chosen to transmit data that comes from sources that are not the same as the
link harness label. This can be helpful when similar gauges are located beyond the length of the link gauge female gauge
extension harness.
Example of EasyLink connectors on a VesselView harness
Engine and Transmission
Engine and transmission data can be selected to display on a compatible link gauge by selecting the harness connection that
will be used to transmit the data.
RPM Sync
RPM synchronization brings multiple engines to the same RPM level utilizing the SYNC button on the CAN trackpad. If the
vessel has a SYNC link gauge, the operator can see the needle move until SYNC is achieved. The default position of the link
harness connection is PORT for this gauge, PORT should always remain checked.
 Loading...
Loading...


