3-53
Teaching pendant (T/B)
3 Controller
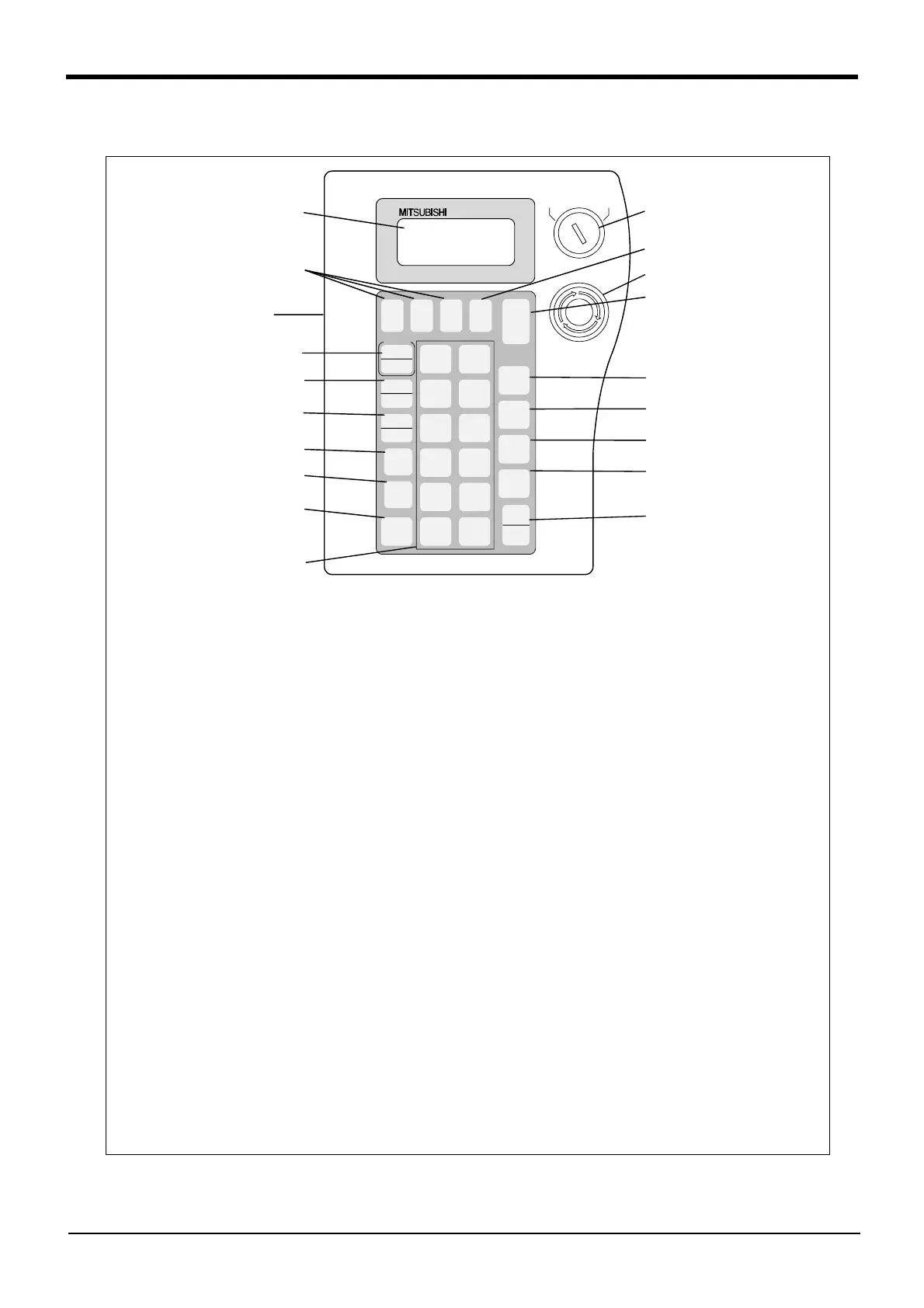
■ Key layout and main functions
Fig.3-10 : Teaching pendant key layout and main functions
R28TB
1)
6)
5)
13)
2)
14)
15)
16)
17)
10)
3)
4)
12)
11)
18)
7)
8)
9)
DISABLE
EMG.STOP
TOOL
=
*
/
STEP
MOVE
+
FORWD
-
BACKWD
ADD
↑
RPL
↓
DEL
←
HAND
→
INP
EXE
COND
ERROR
RESET
POS
CHAR
JOINT
(
)?
XYZ
$" :
MENU
STOP
-
X
(J1)
+
X
(J1)
-
Y
(J2)
+
Y
(J2)
-
Z
(J3)
+
Z
(J3)
-
A
(J4)
+
A
(J4)
-
B
(J5)
+
B
(J5)
-
C
(J6)
+
C
(J6)
SVO ON
ENABLE
# % !
19)
Back
1) : Emergency stop switch...................The robot servo turns OFF and the operation stops immediately.
2) : T/B enable/disable
changeover switch ............................This switch changes the T/B key operation between enable and dis
-
able.
3) : LCD display panel .............................The robot status and various menus are displayed.
4) : <TOOL, JOINT, XYZ> key.............This selects the jog mode (JOINT, XYZ, 3-AXIS XYZ, CYLINDER,
TOOL).
5) : <MENU> key........................................This returns the display screen to the menu screen.
6) : <STOP> key ........................................This stops the program and decelerates the robot to a stop.
7) : <STEP/MOVE> key..........................Jog operation is carried out when this key is pressed simultaneously
with the jog operation key. This also turns the Servo ON and carries
out step jump.
8) : <( + FORWD> key............................This carries out step feed and increases the override.
9) : <( - BACKWD> key.........................This carries out step return (return along operation path) and
decreases the override.
10) : <COND> key.....................................This sets the program.
11) : <ERROR RESET> key...................This resets the error, and releases the software limit.
12) : Jog operation key...........................This operates the robot according to the jog mode. When inputting
numeric values, this inputs each numeric value.
13) : <ADD/ ↑ > key...............................This additionally registers the position data. It also moves the cursor
upward.
14) : <RPL/ ↓ > key................................It also moves the cursor downward.
15) : <DEL/ ← > key................................This deletes the position data. It also moves the cursor to the left.
16) : <HAND/ → > key............................This opens and closes the hand. It also moves the cursor to the right.
17) : <INP/EXE> key................................This inputs the program, and carries out step feed/return.
18) : <POS CHAR> key...........................This changes the edit screen, and changes between numbers and
alphabetic characters.
19) : Deadman switch ..............................When the [Enable/Disable] switch "2)" is enabled, and this key is
released or pressed with force, the servo will turn OFF, and the oper
-
ating robot will stop immediately.
 Loading...
Loading...




