4Software
List of commands
4-88
4 Software
4.1 List of commands
The robot language to use can choose "MELFA-BASIC Ⅳ " (default setting) or "MOVEMASTER language
(MOVEMASTER commands)" by changing the parameter.
Use of "MELFA-BASIC IV" is recommended to effectively use this controller's functions.
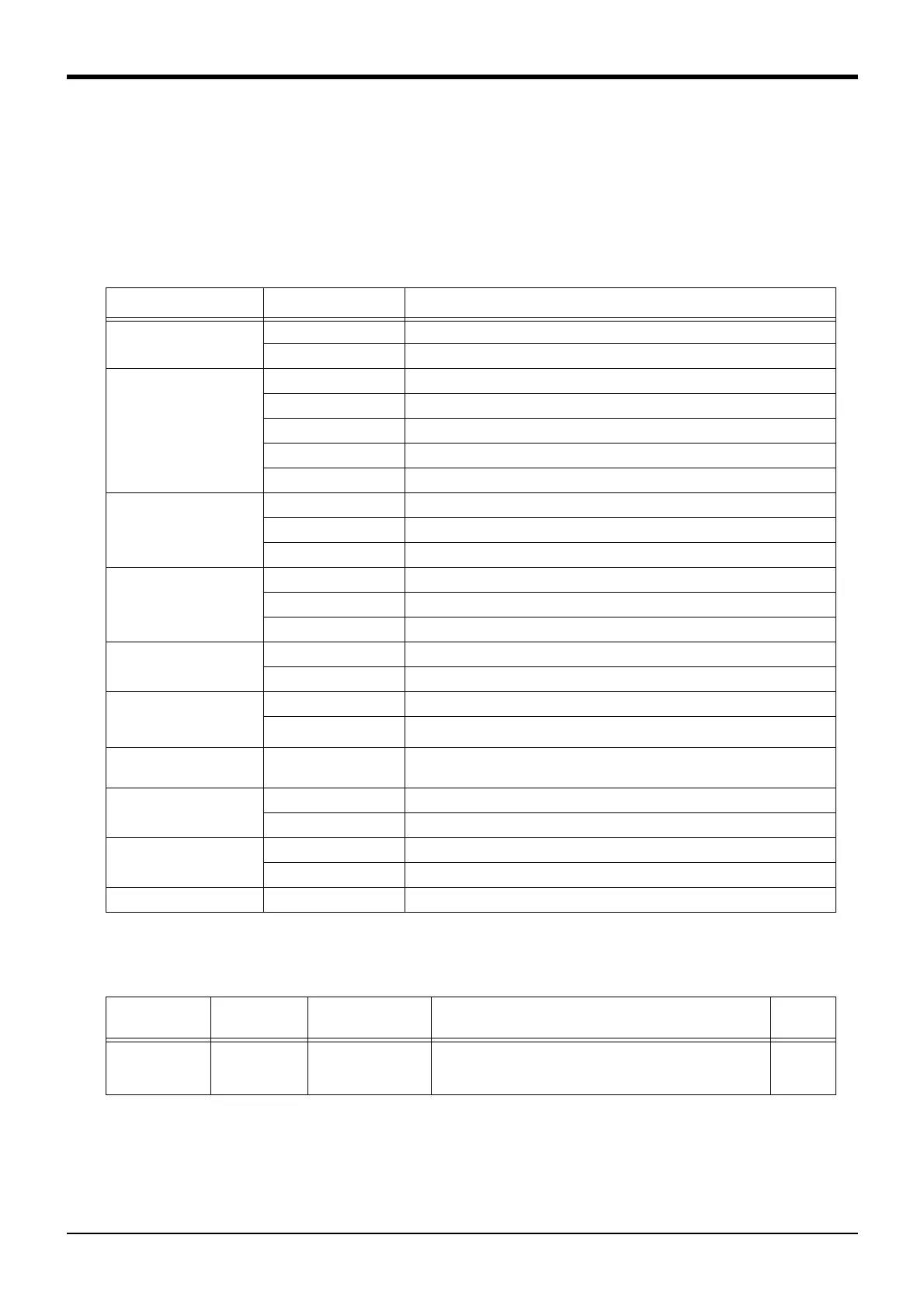
The available new functions in MELFA-BASIC IV are given in Table 4-1.
Table 4-1 : The available new functions in MELFA-BASIC IV
(1) The procedure of robot language selection
Table 4-2 : Robot language parameter
Note 1) "MELFA-BASIC Ⅳ " is default setting.
Note 2) Refer to the separate manual "Explanation of MOVEMASTER COMMANDS"(BFP-A8056) for details of
"MOVEMASTER COMMAND"
Class Command example Function
Robot Status Variable P_TOOL keep current tool length
M_SPD keep current speed (linear/circular interpolation)
Built-in functions ABS Produces the absolute value
VAL Converts a character string into a numeric value
ATN Calculates the arc tangent
STR$ Converts the numeric expression value into a decimal character string
ZONE Check current position area
Operation function P1=P1*P2 Relative calculation of position data
M1=M1*M2 Multiplication of numerical variable
P1.X=10 Operation of the position element data
Conditional branching SELECT CASE More than one condition branch
ON GOSUB Condition branch by the value
WHILE WEND Repeat with condition
Optimum acceleration/
deceleration control
LOADSET Load condition setting
OADL valid/invalid setting for the optimum acceleration/deceleration
Float control
(compliance in the XYZ
coordinate system)
CMP POS Compliance control
CMPG Force control
Parallel execution
(Multitask)
XRUN, XSTP, XRST,
XLOAD, XCLR
Parallel executions of another task, the stops, the resets the clear, and, the loads
Conveyor trucking
[Special specification]
TRKON, TRKOFF Valid/invalid of the trucking
TRBASE Setting the base coordinate for the trucking
Impact detection COLCHK Set to enable/disable the impact detection.
COLLVL Set the detection level of the impact detection.
Singular point passage MVS P1 TYPE 0,2 Pass a singular point using linear interpolation.
Parameter
Parameter
name
No. of arrays
No. of characters
Details explanation
Factory
setting
Robot language RLNG Integer 1
Select the robot language to use
1 : MELFA-BASIC Ⅳ
0 : MOVEMASTER COMMAND
1
 Loading...
Loading...




