28 | ni.com | Getting Started with NI 7340/7350 Controllers and AKD Drives
When you have updated these settings the Settings page should look similar to the
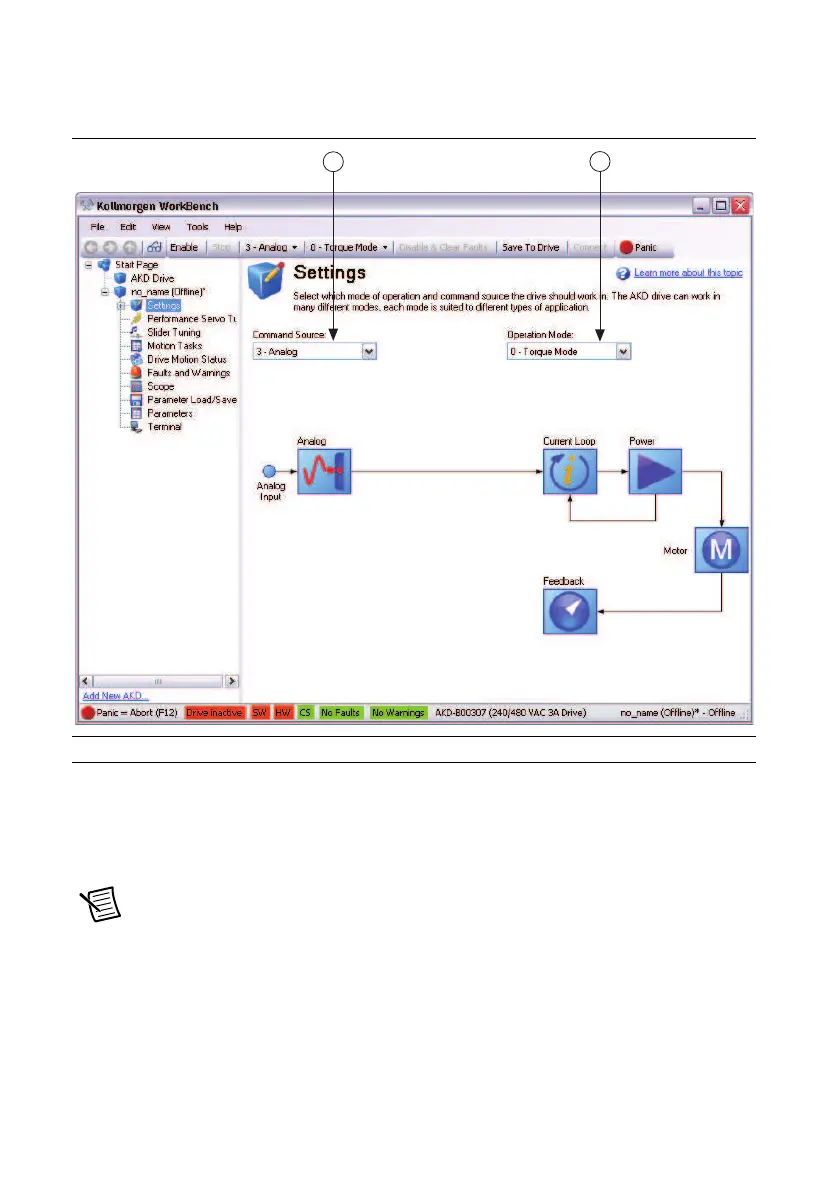
following figure.
Figure 20. AKD WorkBench Settings Page
5. Configure the emulated encoder output.
a. Expand the Settings tree item and open the Encoder Emulation page.
b. Select 1 - Output - With once per rev index pulse from the Function dropdown list.
c. Set the Resolution to 2,000 lines/rev.
Note The encoder resolution output value determines the equivalent resolution of
an incremental encoder in pulses per revolution (PPR). A resolution of 2,000
lines/rev is the same as 8,000 quadrature counts per revolution. You may want to
choose a different value depending on your application needs. In general, higher
resolution values result in more difficult servo loop tuning; lower resolution values
provide less accuracy. If you select a different value for Resolution, remember to
update the Encoder counts per revolution setting in MAX.
d. Set the Index Offset to 0.
1 Command Source Setting 2 Operation Mode Setting
1
2
 Loading...
Loading...







