1 General
BU 0600 en-2319 11
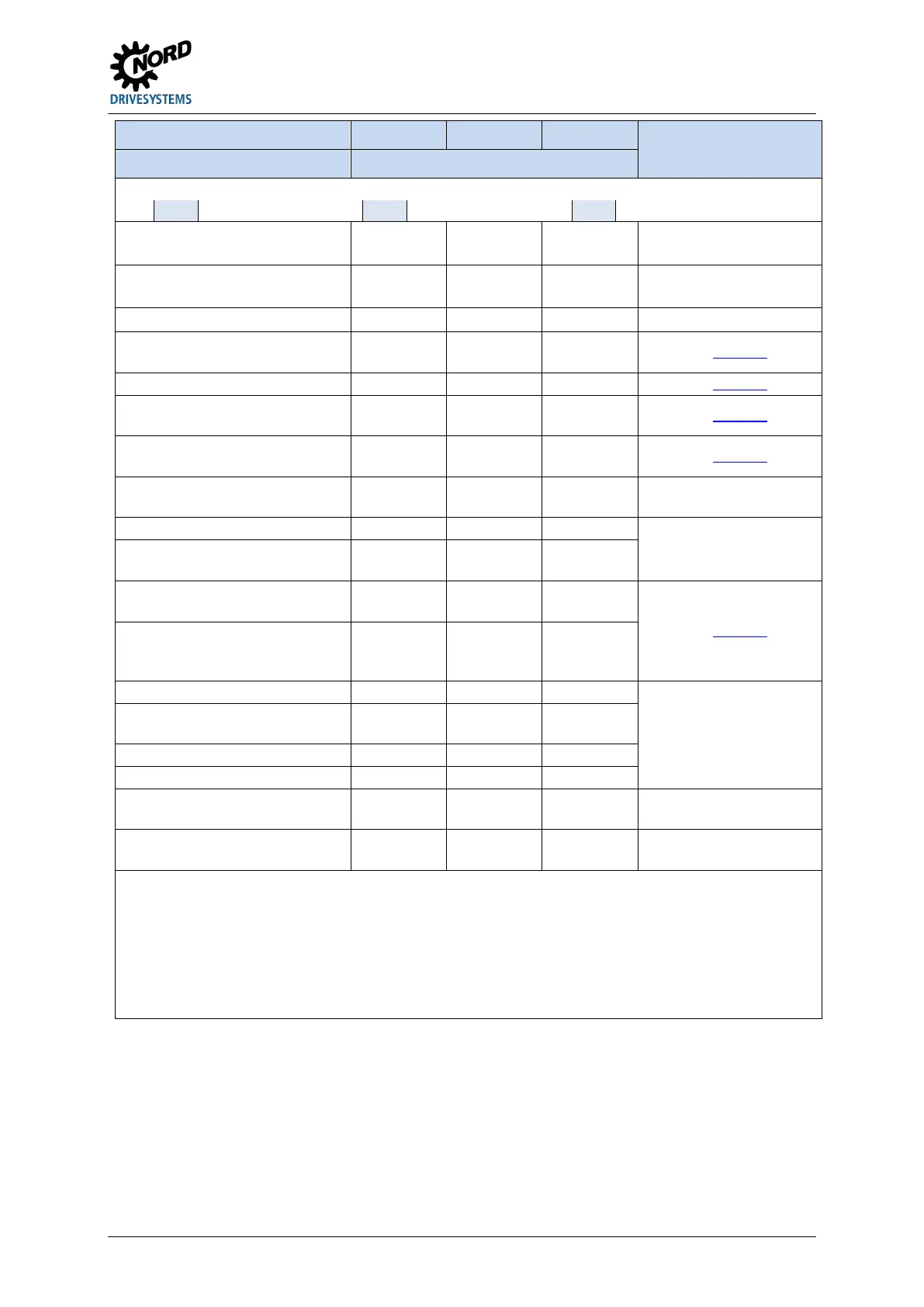
Characteristic SK … 500P/510P 530P 550P
Additional information
Operating manual BU 0600
Legend
x = Present - = Not present O = Optionally available
Load monitor x x x
Section 5.1.6, P525-
P529
Lifting gear functionality x x x
Section 5.1.2, P107,
P114
Process controller / PID controller x x x
Section 8.2
Safe pulse block (STO / SS1)
2)
,
two channel
3)
– O O BU 0630
Integrated POSICON positioning
control
x x x BU 0610
2 x Industrial Ethernet via RJ45
plug
– – x BU 0620
CANbus/CANopen interface via
connection terminals
x x x
Section 2.5.4
HTL encoder connection
4)
x x x
Section 2.6
Speed feedback via incremental
encoder input (TTL)
4)
– x x
CANopen absolute encoder
evaluation
x x x
BU 0610
Universal encoder interface (SSI,
BISS, Hiperface, EnDat and
SIN/COS)
– O O
Number of digital inputs / outputs
6)
Section 2.5.4
Number of analogue inputs /
outputs
2 / 1 2 / 1 2 / 1
Number of relay messages 2 2 2
PTC input with potential isolation
7)
(SK TU5-CTR)
O O O
Section 3.2
Function extension with customer
unit SK CU5-…
8)
- x x
Section 3.1
1) IT network; manual adaptation of hardware configuration required
Optional SK CU5-STO interface
SK 510P: STO and SS1, single channel, on board
4) for speed control and/or positioning (POSICON)
5) Optional SK CU5-ENC, SK CU5-MLT interface
PTC evaluation via digital input (DI5) possible
PTC evaluation via digital input (DI5) also possible
8) 1 x per FI
Table 2: Overview of FI characteristics
 Loading...
Loading...




