31
3-4 Rotational Difference: f4
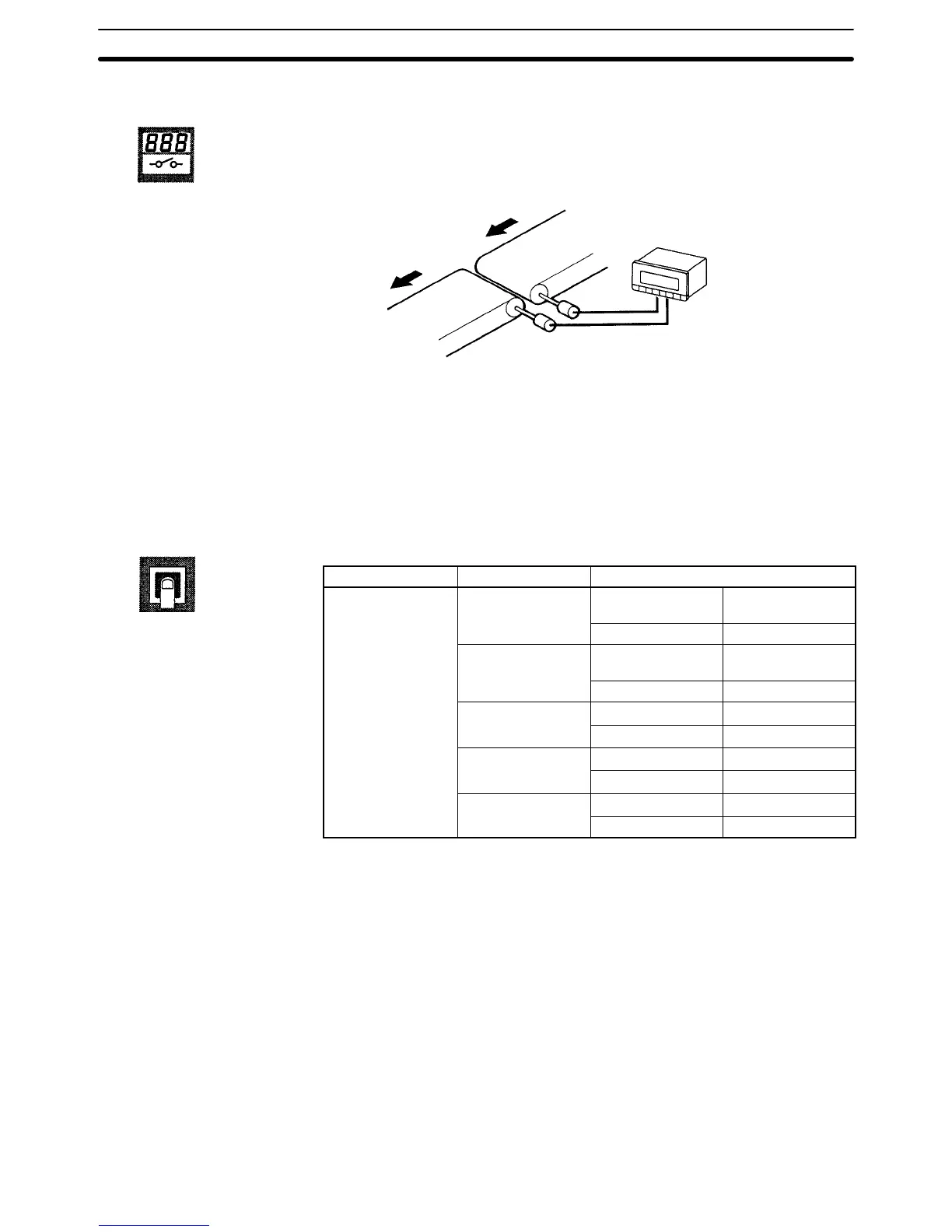
Application example
Measures the rota-
tional difference of
the conveyor belts.
Basic Operation
Displays the rotational difference of INA and INB. Obtain display value D as fol-
lows:
D (rpm) = f
B
x 60 x β – f
A
x 60 x α
f
A
: Input frequency of INA (Hz)
f
B
: Input frequency of INB (Hz)
α: Prescale value of INA
β: Prescale value of INB
Mode Unit of display Prescale value
Rotational
Difference
rpm INA 1/60Na
INB 1/60Nb
Hz (Input pulse
frequency)
INA 1/60
INB 1/60
mm/sec INA
1000πda/60Na
INB
1000πdb/60Nb
m/sec INA
πda/60Na
INB
πdb/60Nb
m/min INA
πda/Na
INB
πdb/Nb
Where,
Na: Number of pulses per revolution from A input
Nb: Number of pulses per revolution from B input
πda: Circumference (m) per revolution for A input
πdb: Circumference (m) per revolution for B input
Example:
Displaying error in frequency (Hz) using two rotary encoders each with 100
output pulses per revolution.
Prescale value of INA (α) = 1/60 = 0.01666... 8 1.6666 x 10
–2
Prescale value of INB (β) = 1/60 = 0.01666... 8 1.6666 x 10
–2
Prescale value = X x 10
Y
(X: mantissa, Y: exponent)
X (mantissa) of input A = 1.6666
Y (exponent) of input A = –2
X (mantissa) of input B = 1.6666
Y (exponent) of input B = –2
FUNCTION
SETTING
Rotational Difference: f4
Section 3-4