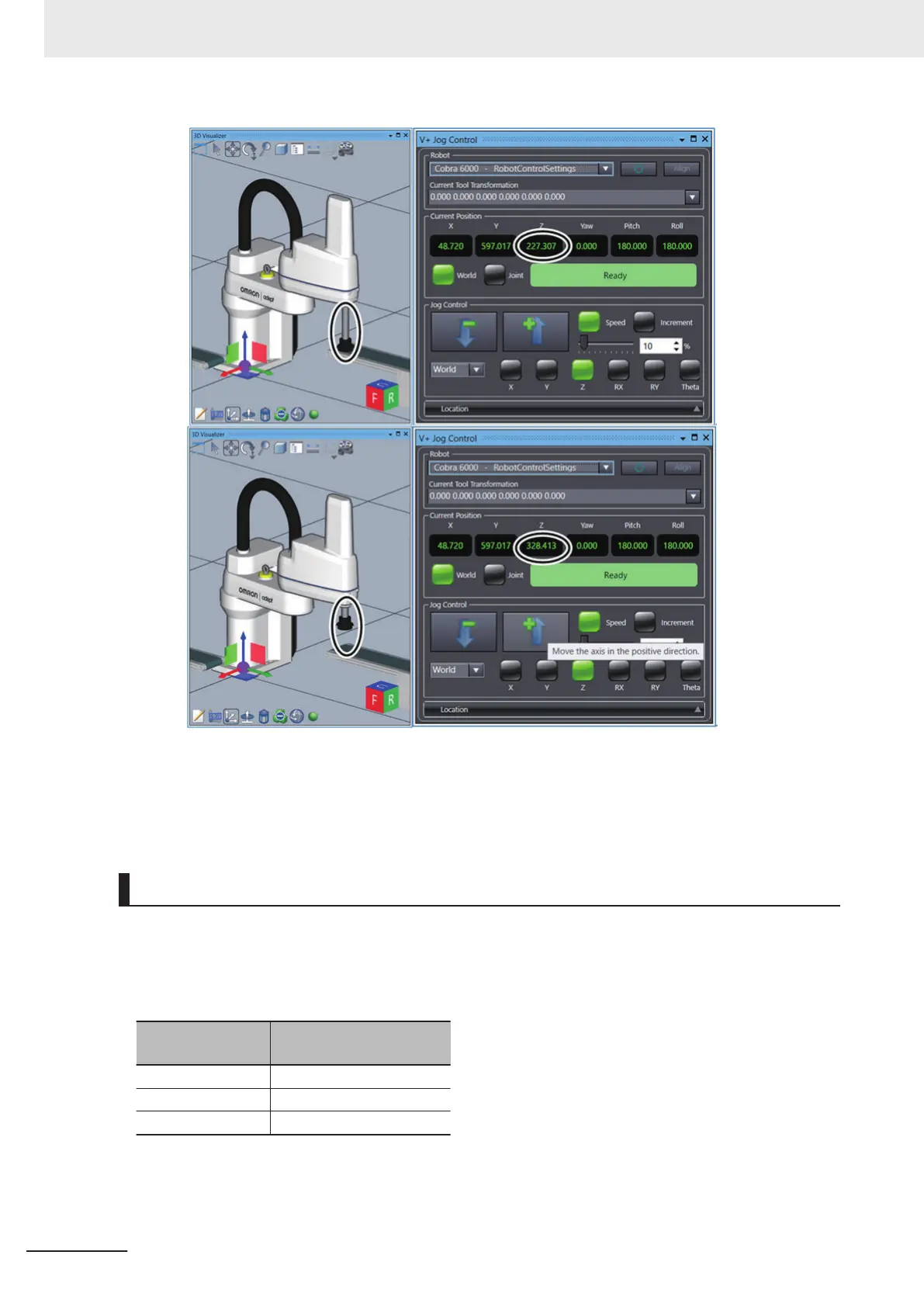
7 Take step 4 to 6 again to move the robot to the position and posture you want to specify.
Now the robot position has been configured.
Saving Current Positions to Variables
The current positions of the robot set by teaching must be saved in the V+ variables.
The procedure to save the current position of the robot to the already created V+ variable is described
below.
V+ position variables that need to be saved are listed in the table below
.
Name of position
(Name of variable)
Description
gl.wait Robot wait position
gl.pick Workpiece pick-up position
gl.place Workpiece place position
Save a current position to the variable gl.wait as an example. Save current positions to two other vari-
ables in the same manner.
3 Implementation Example of Static Pick-and-place Equipment
3-64
NJ-series Robot Integrated System Startup Guide (O049)

 Loading...
Loading...












