23
Precautions for Safe Use
NX-series NX1P2 CPU Unit Hardware User’s Manual (W578)
• Confirm the axis number carefully before you perform an MC Test Run.
• The motor is stopped if communications are interrupted between the Sysmac Studio and the CPU
Unit during an MC Test Run. Connect the communications cable between the computer and CPU
Unit securely and confirm that the system will not be adversely affected before you perform an MC
Tes t Ru n.
• Always execute the Save Cam Table instruction if you change any of the cam data from the user pro-
gram in the CPU Unit or from the Sysmac Studio. If the cam data is not saved, the previous condition
will be restored when the power is turned ON again, possibly causing unexpected machine opera-
tion.
• The positive drive prohibit input (POT), negative drive prohibit input (NOT), and home proximity input
(DEC) of the Servo Drive are used by the MC Function Module as the positive limit input, negative
limit input, and home proximity input. Make sure that the signal widths for all of these input signals
are longer than the control period of the MC Function Module. If the input signal widths are shorter
than the control period, the MC Function Module may not be able to detect the input signals, resulting
in incorrect operation.
• If you make any changes in the Detailed Settings Area of the Axis Basic Settings Display of the Sys-
mac Studio, make sure that the devices or machines perform the expected operation before you start
actual operation.
If the relationship between the functions of the Motion Control Function Module and the EtherCAT
slave process data that is assigned to the axes is not correct, the devices or machines may perform
unexpected operation.
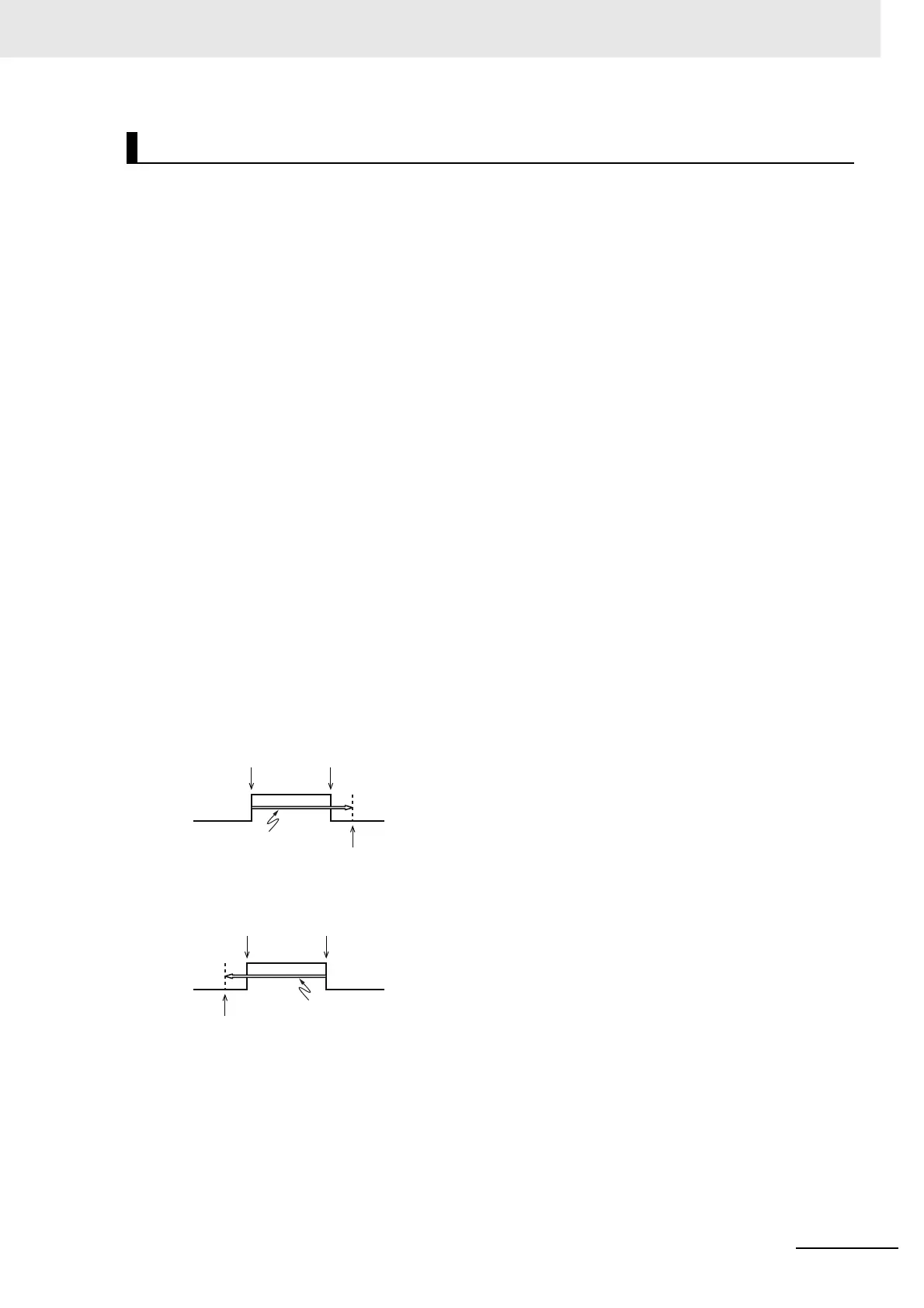
• Always use the axis at a constant velocity for the MC_DigitalCamSwitch (Enable Digital Cam Switch)
instruction.
If you set the Count Mode to Rotary Mode, the following operation will occur if you use OnCompensa-
tion or OffCompensation and the axis velocity changes abruptly.
a) If the value of OnCompensation or OffCompensation is equivalent to the time for half a rotation
or more, InOperation will be FALSE.
b) If the value of OnCompensation results in exceeding LastOnPosition, the output timing will be
unstable.
c) If the value of OffCompensation results in exceeding FirstOnPosition, the output timing will be
unstable.
• Use the NX_AryDOutTimeStamp (Write Digital Output Array with Specified Time Stamp) instruction
only after you confirm that InOperation from the MC_DigitalCamSwitch (Enable Digital Cam Switch)
instruction is TRUE.
• If you change the unit conversion settings, perform homing again. If you do not perform homing, unin-
tended operation of the controlled system may occur.
Motion Control
FirstOnPosition LastOnPosition
OnCompensation
FirstOnPosition after compensation
FirstOnPosition LastOnPosition
OffCompensation
LastOnPosition after compensation

 Loading...
Loading...






