6-43
6-7 Object Dictionary
OMNUC G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
6
Drive Profile
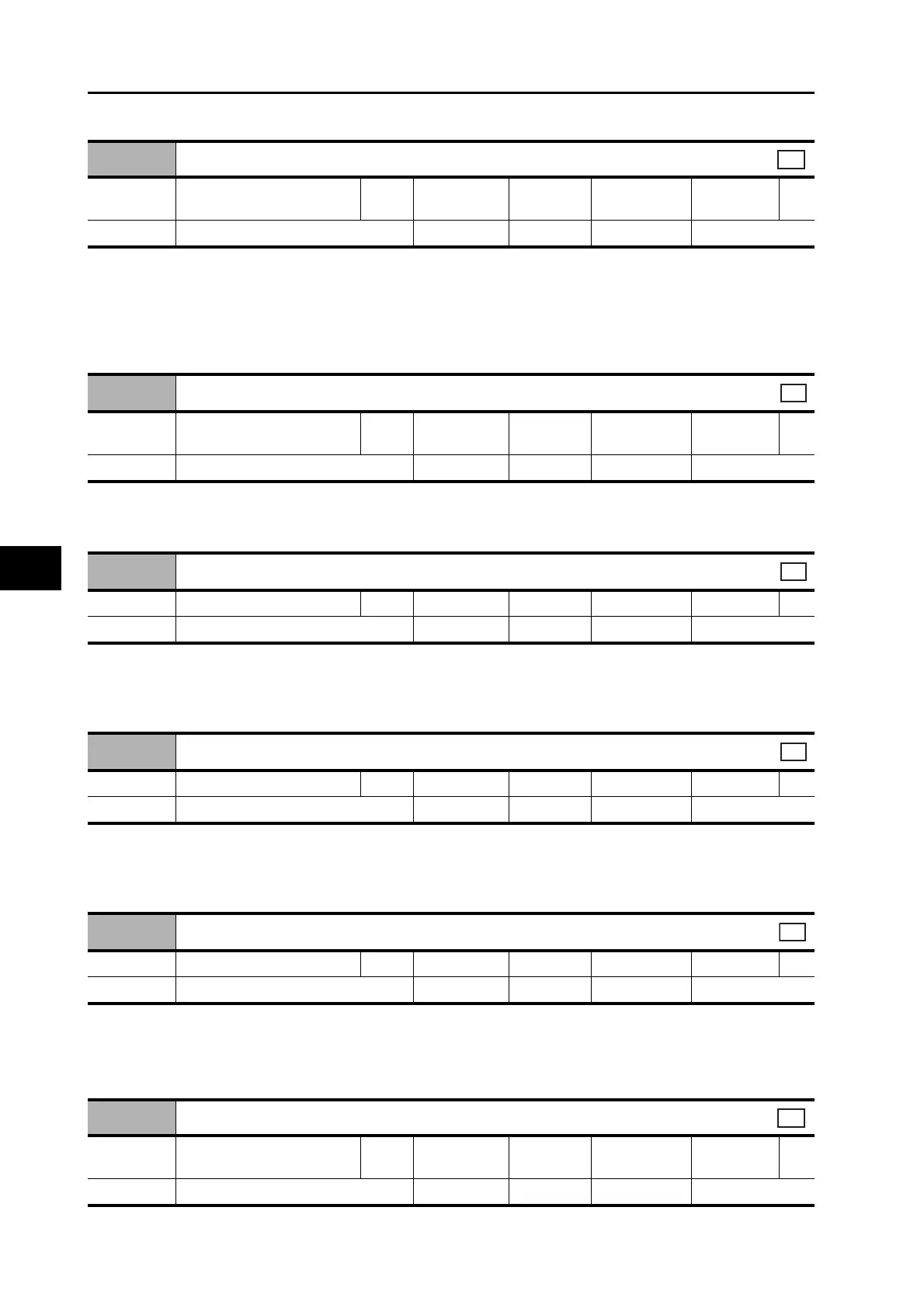
This object gives the present position.
This object sets the threshold for following errors.
If it is set to 4,294,967,295 (FFFF FFFF hex), detection of following errors is disabled.
If it is set to 0, there will always be a following error.
When it is set to between 134,217,729 and 4,294,967,294, the set value becomes 134,217,728.
This object gives the present speed.
This object sets the maximum torque.
It is in units of 0.1% of the rated torque.
This object gives the Servo Drive's internal torque command value.
It is in units of 0.1% of the rated torque.
This object gives the feedback torque value. The values are the same as for the internal torque
command value.
It is in units of 0.1% of the rated torque.
6065 hex
Following error window
Range
0 to 134217728,
4294967295
Unit
Command
units
Default 100000 Attribute A
Size 4 bytes (U32) Access RW PDO map Not possible
csp
606C hex
Velocity actual value
Range
−2147483648 to
2147483647
Unit
Command
units/s
Default 0 Attribute -
Size 4 bytes (U32) Access RO PDO map Possible
All
6072 hex
Max torque
Range 0 to 5000 Unit 0.1% Default 5000 Attribute A
Size 2 bytes (U16) Access RW PDO map Possible
All
6074 hex
Torque demand
Range −5000 to 5000 Unit 0.1% Default 0 Attribute -
Size 2 bytes (INT16) Access RO PDO map Possible
All
6077 hex
Torque actual value
Range −5000 to 5000 Unit 0.1% Default 0 Attribute -
Size 2 bytes (INT16) Access RO PDO map Possible
All
607A hex
Target position
Range
−2147483648 to
2147483647
Unit
Command
units
Default 0 Attribute A
Size 4 bytes (INT32) Access RW PDO map Possible
csp

 Loading...
Loading...





