9 Servo Parameter Objects
9-44
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
• Set the functions by bit.
• Set the decimal value that has been converted from the bits.
• In the default settings, only the command compensation for communications errors for CSP is
enabled. The number 64 (decimal) is 1000 000 when represented as bits.
Explanation of Settings
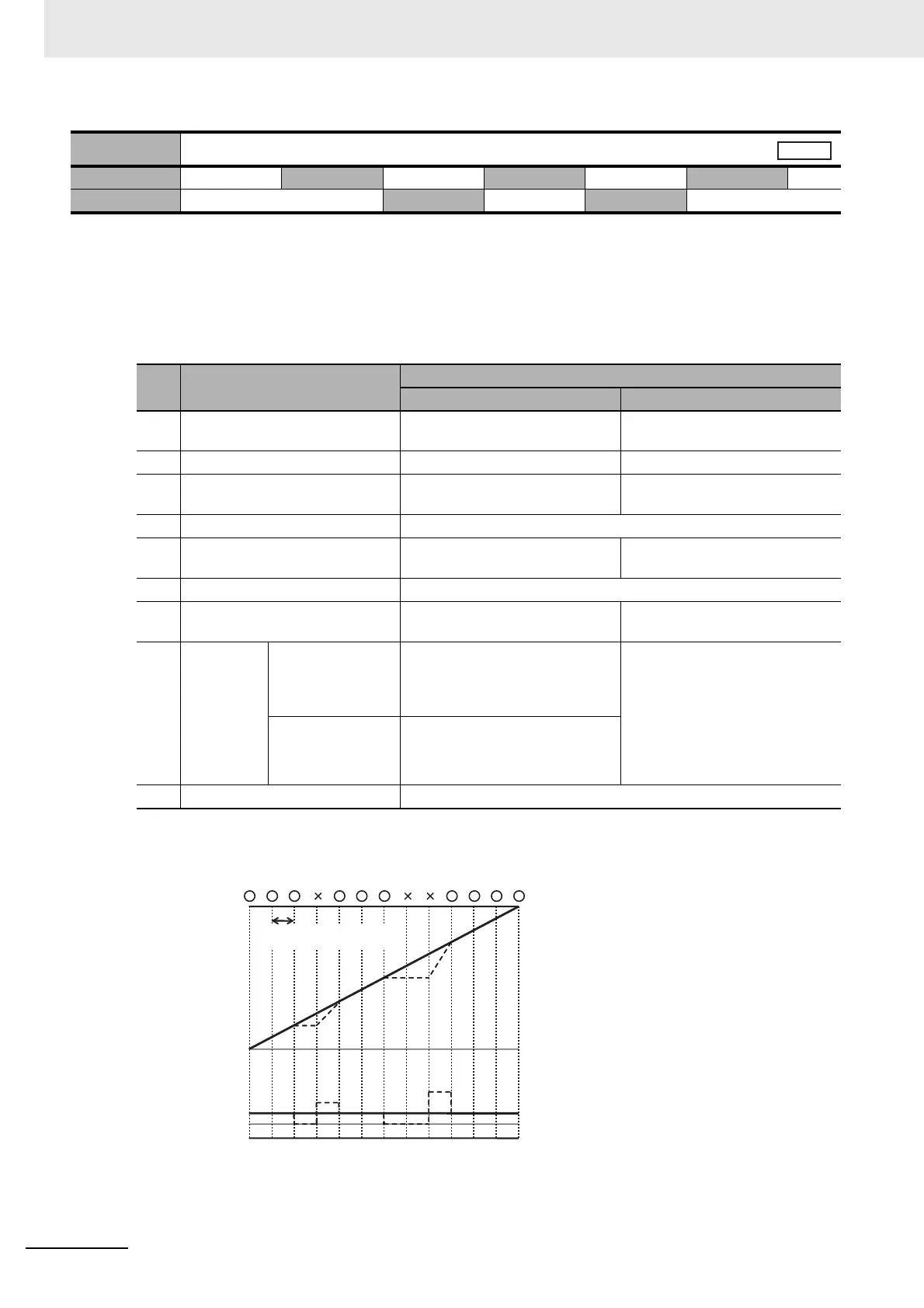
• If the command compensation for communications errors for CSP is enabled and a communications
error occurs, the Servo Drive will compensate and control the internal command based on the value
of the Target position (607A hex) that was most recently received normally.
Solid line: Command compensation enabled.
Dashed line: Command compensation disabled.
❍: Normal communications
: Communications error
3610 hex
Function Expansion Setting
Setting range 0 to 511 Unit
Default setting
64
Data attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible.
Bit Function
Set value
0 1
bit 0 Instantaneous speed observer
function
Disabled Enabled
bit 1 Disturbance observer function Disabled Enabled
bit 2 Disturbance observer operation
setting
Enabled at all time Only when Gain 1 is selected
bit 3 Reserved Fixed to 0.
bit 4 Electric current response
improvement function
Disabled Enabled
bit 5 Reserved Fixed to 0.
bit 6 Command compensation for
communications errors for CSP
Disabled Enabled
bit 7 INP output
limit
Positioning
completion signal
(INP1)
Output based on the presence/absence
of a position error or command,
regardless of the completion status of
magnetic pole position estimation.
When the Magnetic Pole
Detection Method (3920 hex) is
set to 2, both the positioning
completion signal 1 (INP1) and
the positioning completion signal
2 (INP2) will be forced to OFF
unless magnetic pole position
estimation is completed.
Positioning
completion signal
(INP2)
Output based on the position error,
regardless of the completion status
of magnetic pole position estimation.
bit 8 Reserved Fixed to 0.
Command
speed
Command
position
Communications cycle
0

 Loading...
Loading...

