9 Servo Parameter Objects
9-46
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
• Set the compensation gain for the disturbance force.
Refer to 11-8 Disturbance Observer Function on page 11-26.
• Set the filter time constant for disturbance force compensation.
Refer to 11-8 Disturbance Observer Function on page 11-26.
• Set the speed to estimate the load characteristic while the realtime autotuning is enabled.
• The higher the set value is, the earlier the load characteristic change is followed, but the estimated
variation against the disturbance becomes greater.
• The estimated results is updated in every 30 minutes and saved in EEPEOM.
Explanation of Settings
Refer to 11-3 Realtime Autotuning on page 11-7 for details of realtime autotuning settings.
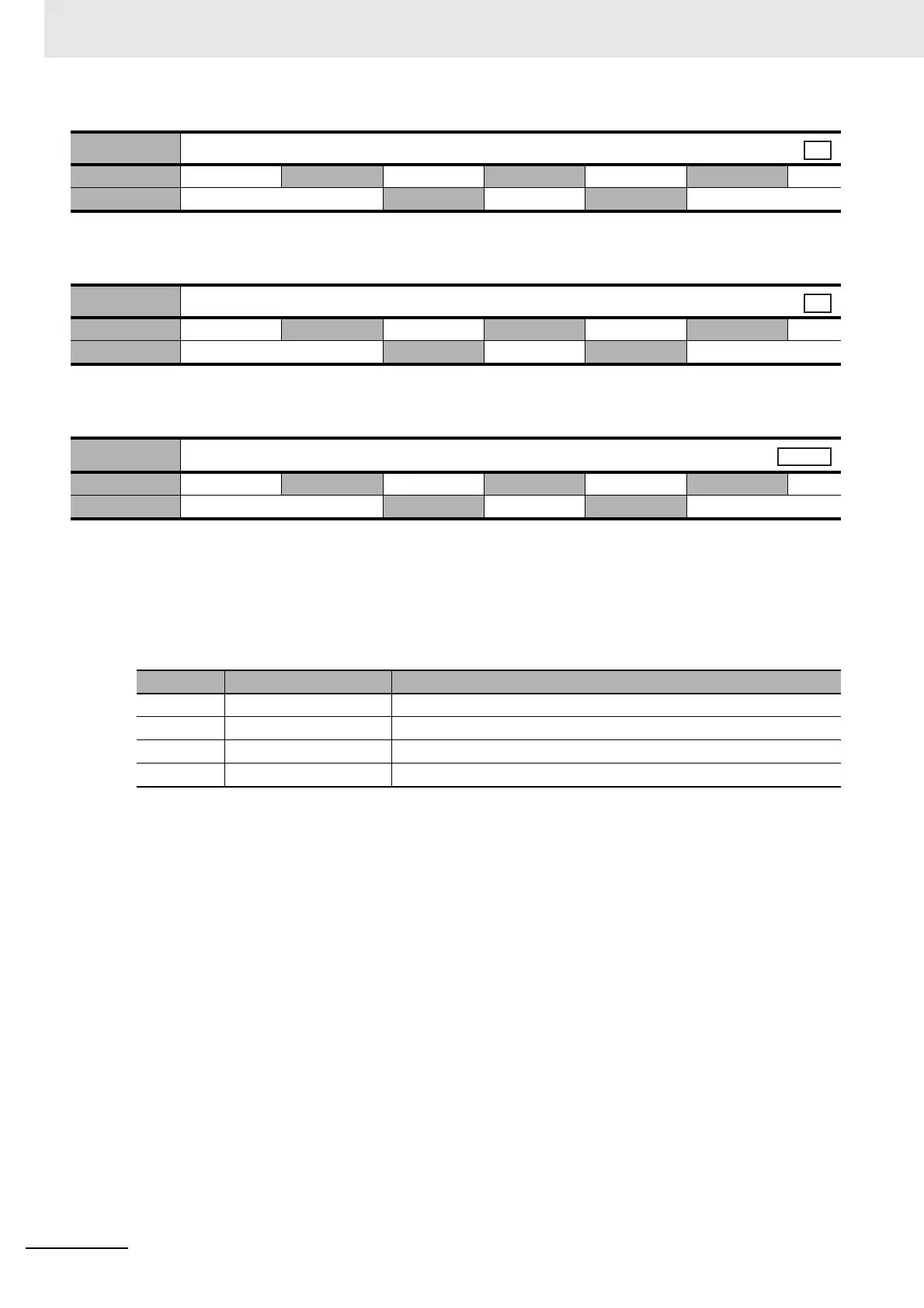
3623 hex
Disturbance Force Compensation Gain
Setting range 100 to 100 Unit %
Default setting
0
Data attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible.
3624 hex
Disturbance Observer Filter Setting
Setting range 10 to 2500 Unit 0.01 ms
Default setting
53
Data attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible.
3631 hex
Realtime Autotuning Estimated Speed Selection
Setting range 0 to 3 Unit
Default setting
0
Data attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible.
Set value Mode Description
0 No change Stops load estimation.
1 Little change Estimates every minute from the load characteristic changes.
2 Gradual change Estimates every second from the load characteristic changes.
3 Sharp change Estimates the optimum from the load characteristic changes.

 Loading...
Loading...

