9-59
9 Servo Parameter Objects
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
9-8 Linear Motor Objects
9
• Set the current loop proportional gain.
• Normally, use the value automatically set via the Current Response Auto-adjustment (3912 hex)
object as is.
• Set the current loop integral gain
• Normally, use the value automatically set by the Current Response Auto-adjustment (3912 hex)
object.
• Set the two-stage force filter time constant.
• When set to 0, this object is disabled.
When used for the secondary filter with the Two-stage Force Filter
Attenuation Term (3916 hex) set to greater than or equal to 50
The supported time constant is 5 to 159 (0.05 to 1.59 ms), which is equivalent to a frequency of
100 to 3,000 Hz. The set values 1 to 4 correspond to the time constant 5 (3,000 Hz); the set
values 159 to 2500 correspond to the time constant 159 (100 Hz).
Precautions for Correct UsePrecautions for Correct Use
Setting an excessively large value may cause an unstable control behavior, resulting in vibration.
Adjust the value while checking the operating conditions.
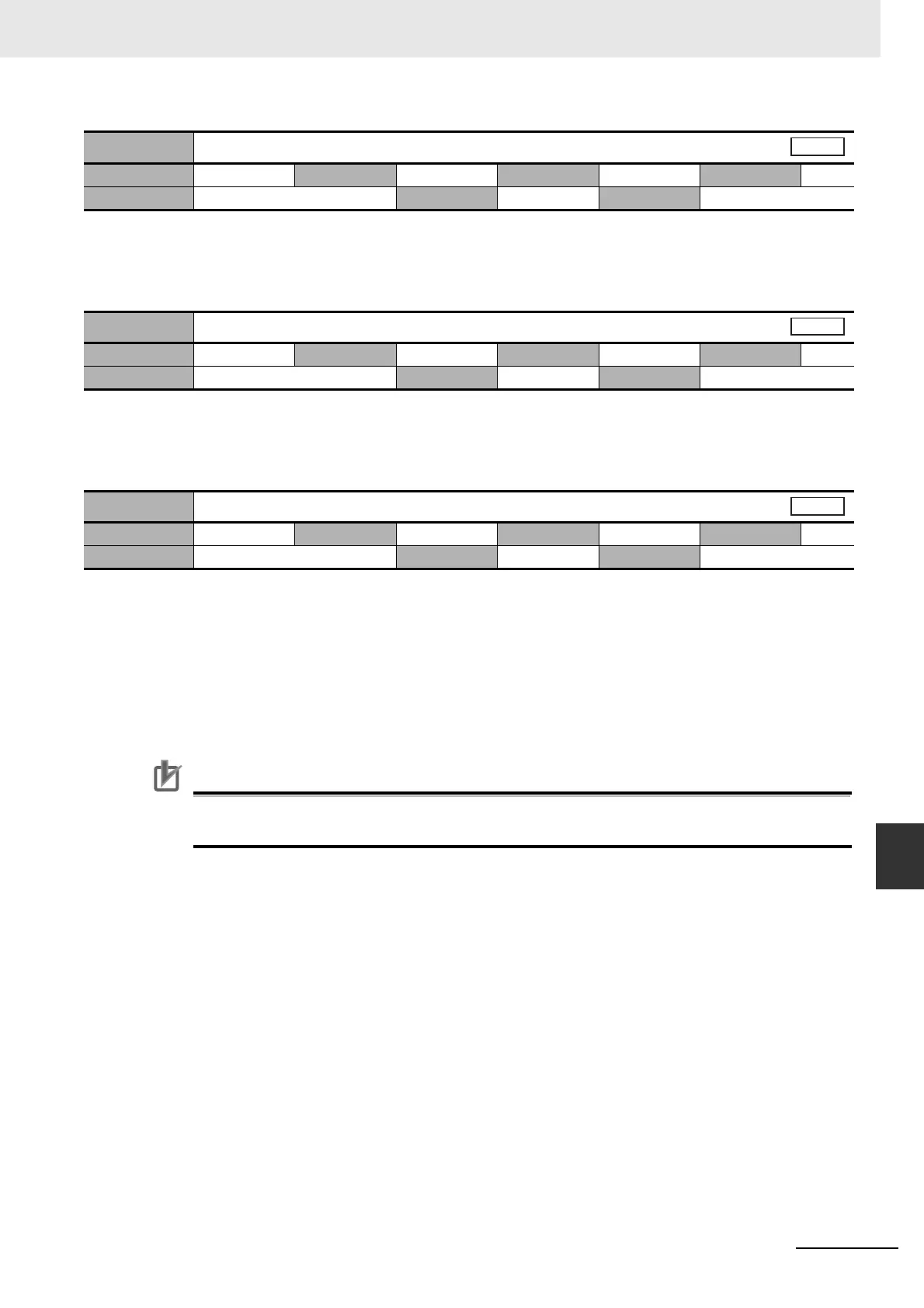
3913 hex
Current Loop Proportional Gain
Setting range 0 to 32767 Unit –
Default setting
50
Data Attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible.
3914 hex
Current Loop Integral Gain
Setting range 0 to 32767 Unit –
Default setting
10
Data Attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible.
3915 hex
Two-stage Force Filter Time Constant
Setting range 0 to 2500 Unit 0.01 ms
Default setting
0
Data Attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible.

 Loading...
Loading...

