9 Servo Parameter Objects
9-60
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
• Set the two-stage force filter time attenuation term.
• This setting is used to switch the filter order (primary or secondary) of the two-stage force filter.
Explanation of Settings
Precautions for Correct UsePrecautions for Correct Use
• Setting an excessively large value may cause an unstable control behavior, resulting in
vibration. Adjust the value while checking the operating conditions.
• Changing the set value during operation may result in vibration. Stop the Servo Drive before
changing the set value.
• Set the magnetic pole detection method.
Explanation of Settings
For details on the Magnetic Pole Detection Method, refer to Setting the Magnetic Pole Detection Data
on page 10-8.
Precautions for Correct UsePrecautions for Correct Use
If you set this object to 0, a Motor Setting Error (Error No. 60.0) will occur.
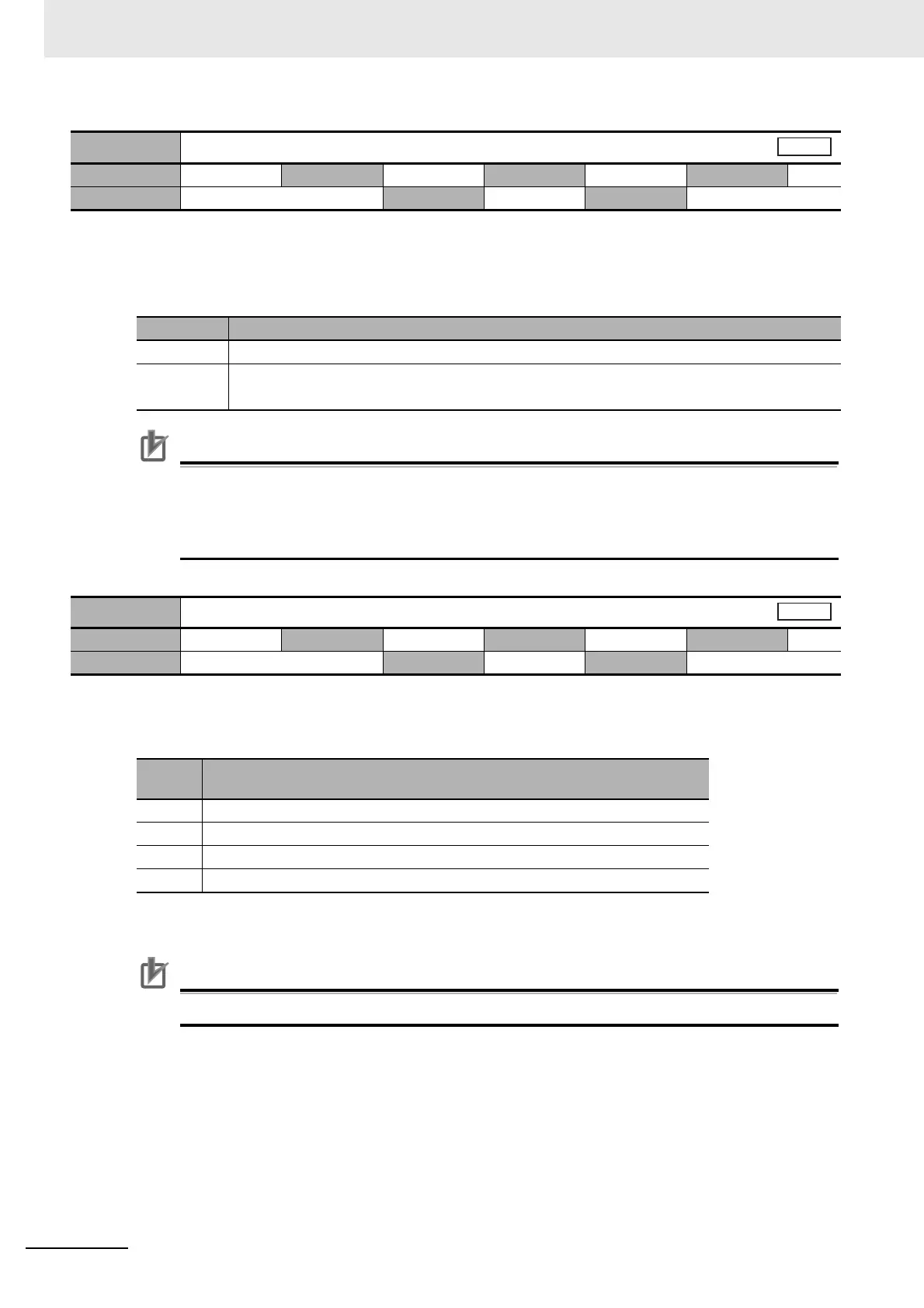
3916 hex
Two-stage Force Filter Attenuation Term
Setting range 0 to 1000 Unit –
Default setting
1000
Data Attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible.
Set value Description
0 to 49 The filter behaves as the primary filter.
50 to 1000
The filter behaves as the secondary filter. 1000 indicates a secondary filter of = 1.0.
Setting a smaller value results in larger vibration. Normally, set this object to 1000.
3920 hex
Magnetic Pole Detection Method
Setting range 0 to 3 Unit –
Default setting
0
Data attribute
R
Size 2 bytes (INT16) Access RW PDO map Not possible.
Set
value
Description
0 Not specified
1 Reserved
2 Magnetic pole position estimation method
3 Magnetic pole position restoration method

 Loading...
Loading...

