Appendicies
A-38
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
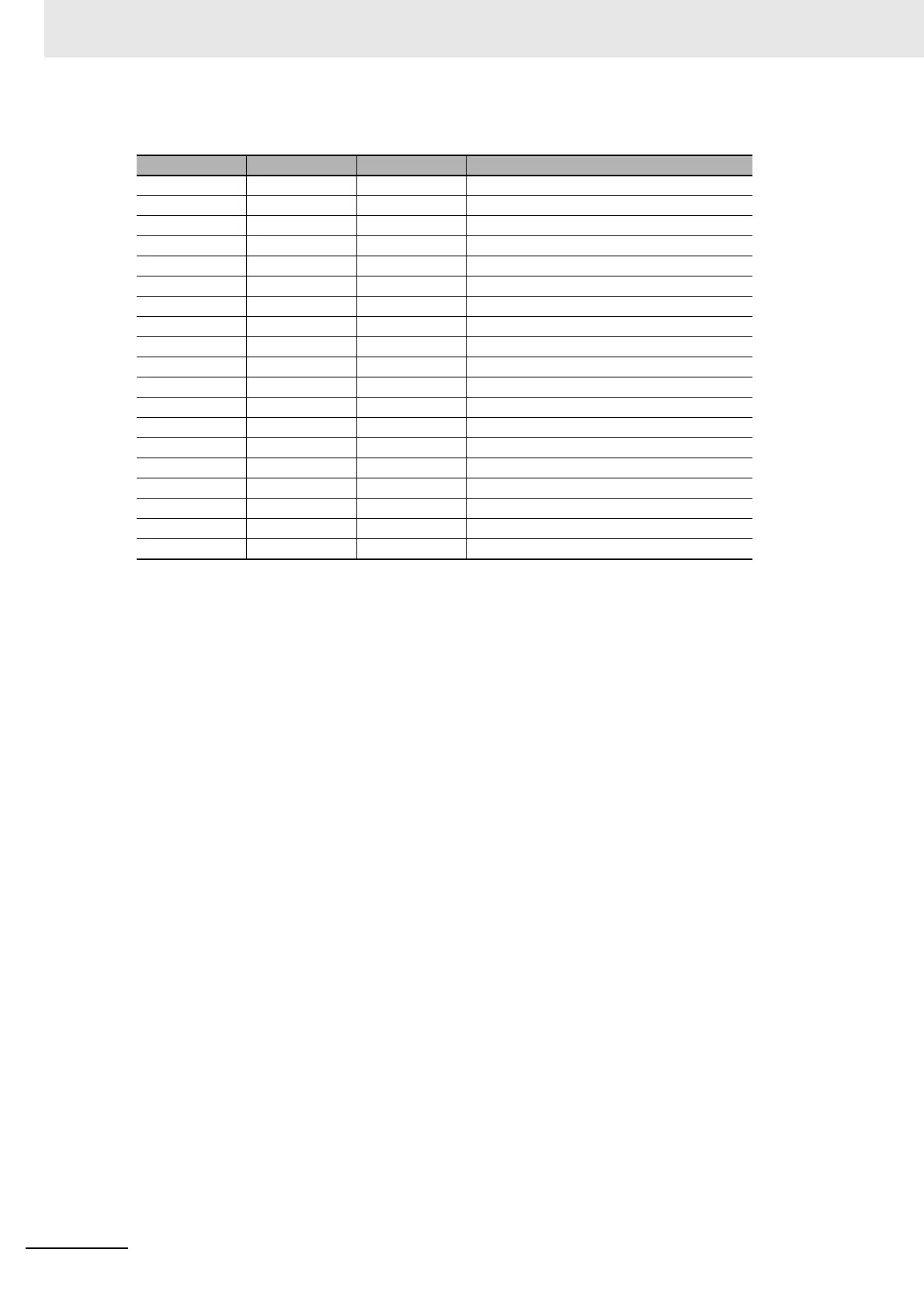
• The following objects can be mapped to the Receive PDO mapping.
Index Sub-Index Bit length Object name
2002 hex 01 hex 08 hex Sysmac Error Status
4000 hex 00 hex 10 hex Statusword1
4001 hex 00 hex 10 hex Sub Error Code
603F hex 00 hex 10 hex Error code
6041 hex 00 hex 10 hex Statusword
6061 hex 00 hex 08 hex Modes of operation display
6062 hex 00 hex 20 hex Position demand value
6063 hex 00 hex 20 hex Position actual internal value
6064 hex 00 hex 20 hex Position actual value
606C hex 00 hex 20 hex Velocity actual value
6074 hex 00 hex 10 hex Torque demand
6077 hex 00 hex 10 hex Torque actual value
60B9 hex 00 hex 10 hex Touch probe status
60BA hex 00 hex 20 hex Touch probe pos1 pos value
60BC hex 00 hex 20 hex Touch probe pos2 pos value
60F4 hex 00 hex 20 hex Following error actual value
60FA hex 00 hex 20 hex Control effort
60FC hex 00 hex 20 hex Position demand internal value
60FD hex 00 hex 20 hex Digital inputs

 Loading...
Loading...

