Appendicies
A-64
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
• This object sets the acceleration rate in the Cyclic synchronous torque mode (cst).
• The setting resolution is 4,000. For example, if you set 5,000, the resolution will be 4,000.
• This object sets the deceleration rate in the Cyclic synchronous torque mode (cst).
• The setting resolution is 4,000. For example, if you set 5,000, the resolution will be 4,000.
• This object enables and disables the position command FIR filter.
• When this object is set to 1, the value of Position Command FIR Filter Time Constant (3818 hex) is
enabled.
• When this object is set to 0, the position command FIR filter is disabled.
• The position command FIR filter can be used in Cyclic synchronous position mode (csp), Profile
position mode (pp), and Homing mode (hm).
• When the communications cycle is set to 250 s or 500 s, the position command FIR filter is
disabled regardless of this setting.
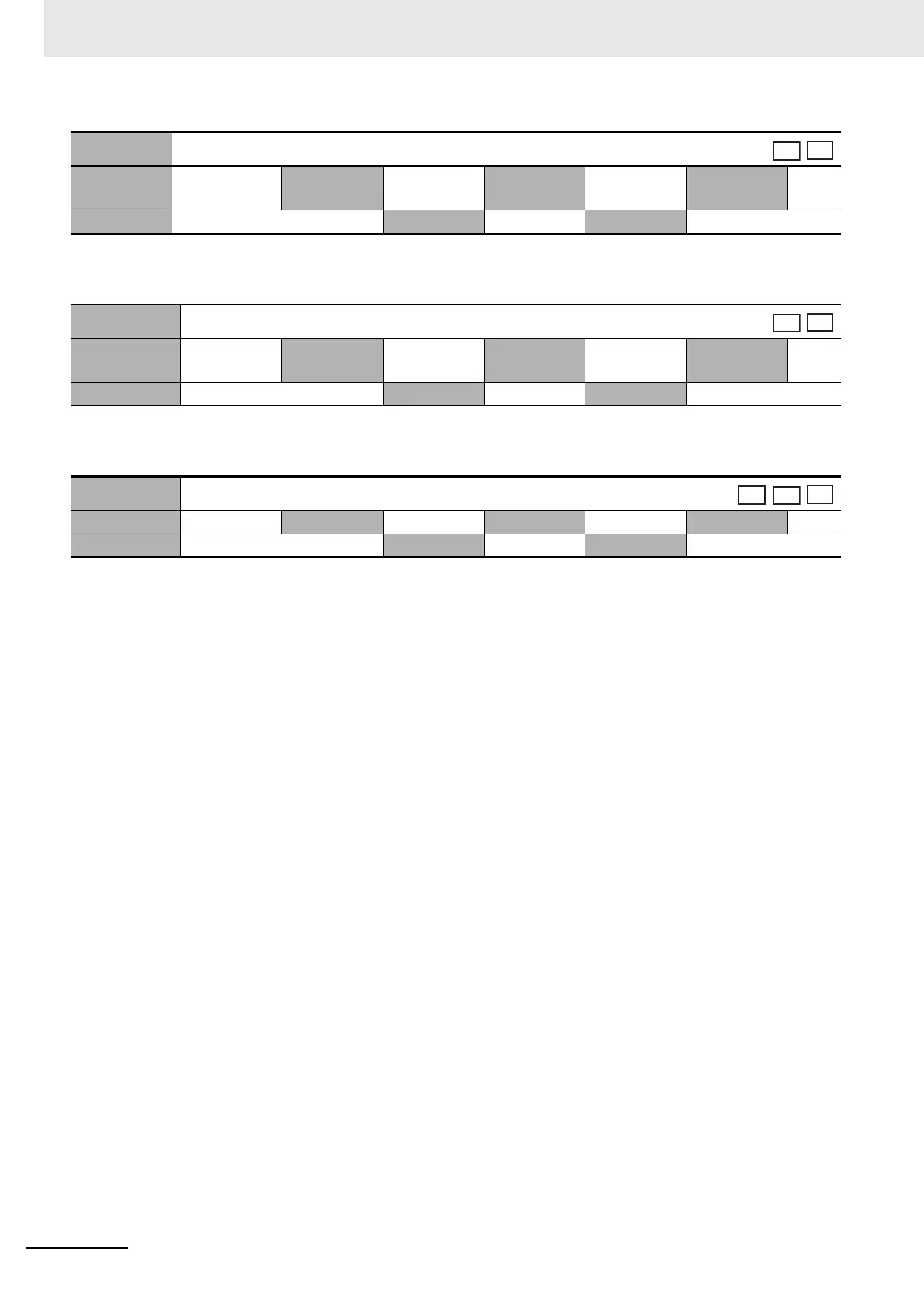
6083 hex
Profile acceleration
Range 1 to
655,350,000
Unit Command
units/s
2
Default 1,000,000 Attribute B
Size 4 bytes (U32) Access RW PDO map Not possible
6084 hex
Profile deceleration
Range 1 to
655,350,000
Unit Command
units/s
2
Default 1,000,000 Attribute B
Size 4 bytes (U32) Access RW PDO map Not possible
6086 hex
Motion profile type
Range 1 to 0 Unit Default 0 Attribute B
Size 2 bytes (INT16) Access RW PDO map Possible

 Loading...
Loading...

