A-65
Appendicies
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
A-1 CiA402 Drive Profile
App
A-1-12 Servo Drive Profile Object
• These objects set the gear ratio.
• Set the numerator of the electronic gear in the object for Motor revolutions (Sub-index 01 hex).
• Set the denominator of the electronic gear in the object for Shaft revolutions (Sub-index 02 hex).
• Set the gear ratio to between 1/1,000 and 1,000. If the gear ratio is out of range, an Object Setting
Error (Error No. 93.0) will occur.
For details on the electronic gear settings, refer to 7-6 Electronic Gear Function on page 7-20.
• This objects sets the Homing method in the Homing mode (hm).
Description of Settings
• If the homing operation is started by setting a value other than 8, 12, 19, 20, 33, 34, or 35, a
Command Error (Error No. 91.1) will occur.
For details on homing, refer to A-1-6 Homing Mode Specifications on page A-15.
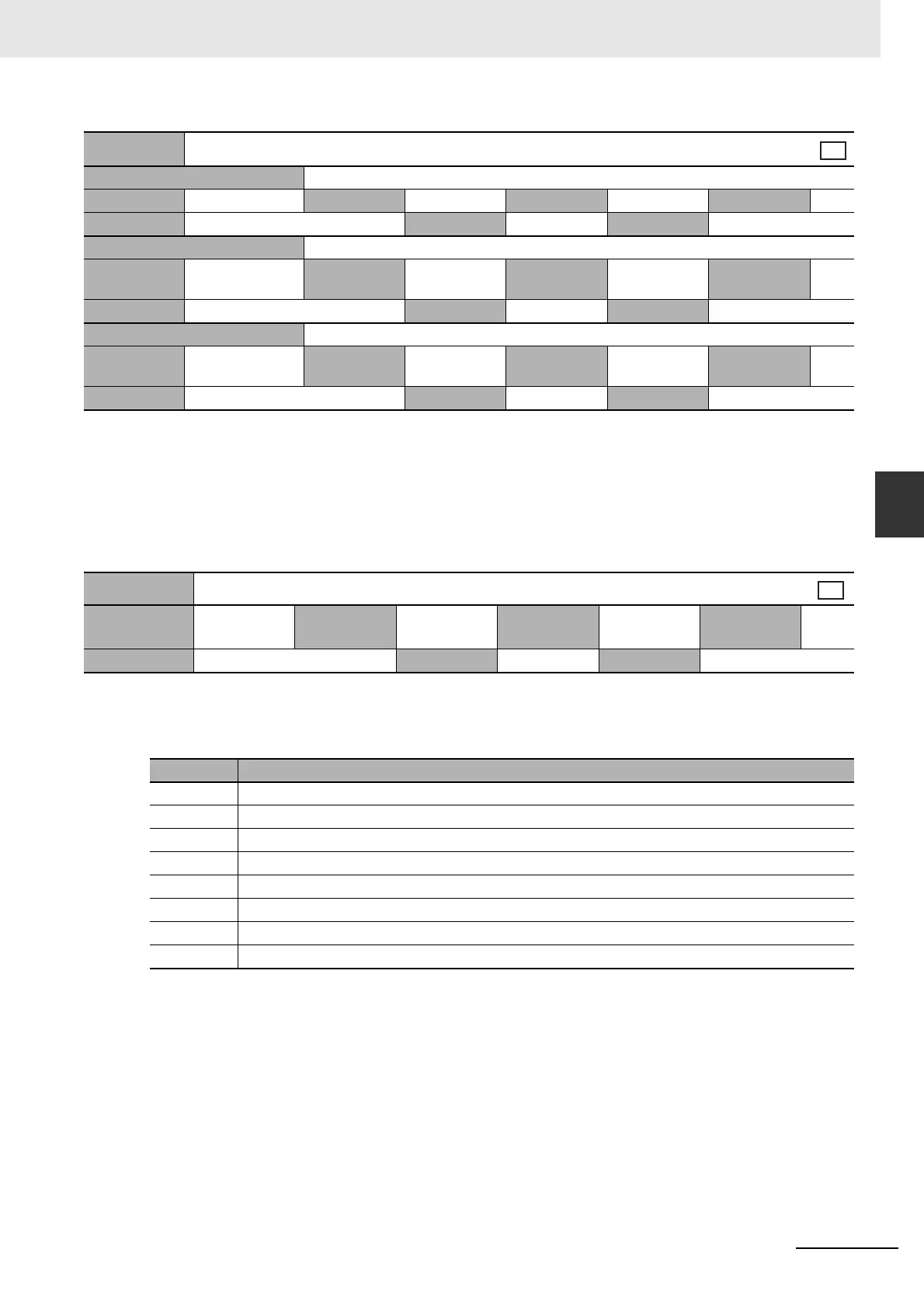
6091 hex
Gear ratio
Sub-index 00 hex Number of entries
Range Unit Default 02 hex Attribute
Size 1 byte (U8) Access RO PDO map Not possible
Sub-index 01 hex Motor revolutions
Range 0 to
1,073,741,824
Unit Default 1 Attribute C
Size 4 bytes (U32) Access RW PDO map Not possible
Sub-index 02 hex Shaft revolutions
Range 1 to
1,073,741,824
Unit Default 1 Attribute C
Size 4 bytes (U32) Access RW PDO map Not possible
6098 hex
Homing method
Range 128 to 127 Unit Command
units/s
2
Default 0 Attribute B
Size 1 byte (INT8) Access RW PDO map Not possible
Set value Explanation
0 Not specified
8 Homing by Origin Proximity Input and origin signal (positive operation start)
12 Homing by Origin Proximity Input and origin signal (negative operation start)
19 Homing without origin signal (positive operation start)
20 Homing without origin signal (negative operation start)
33 Homing with origin signal (negative operation start)
34 Homing with origin signal (positive operation start)
35 Present home preset
All
hm

 Loading...
Loading...

