A-129
Appendicies
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
A-3 Sysmac Error Status Codes
App
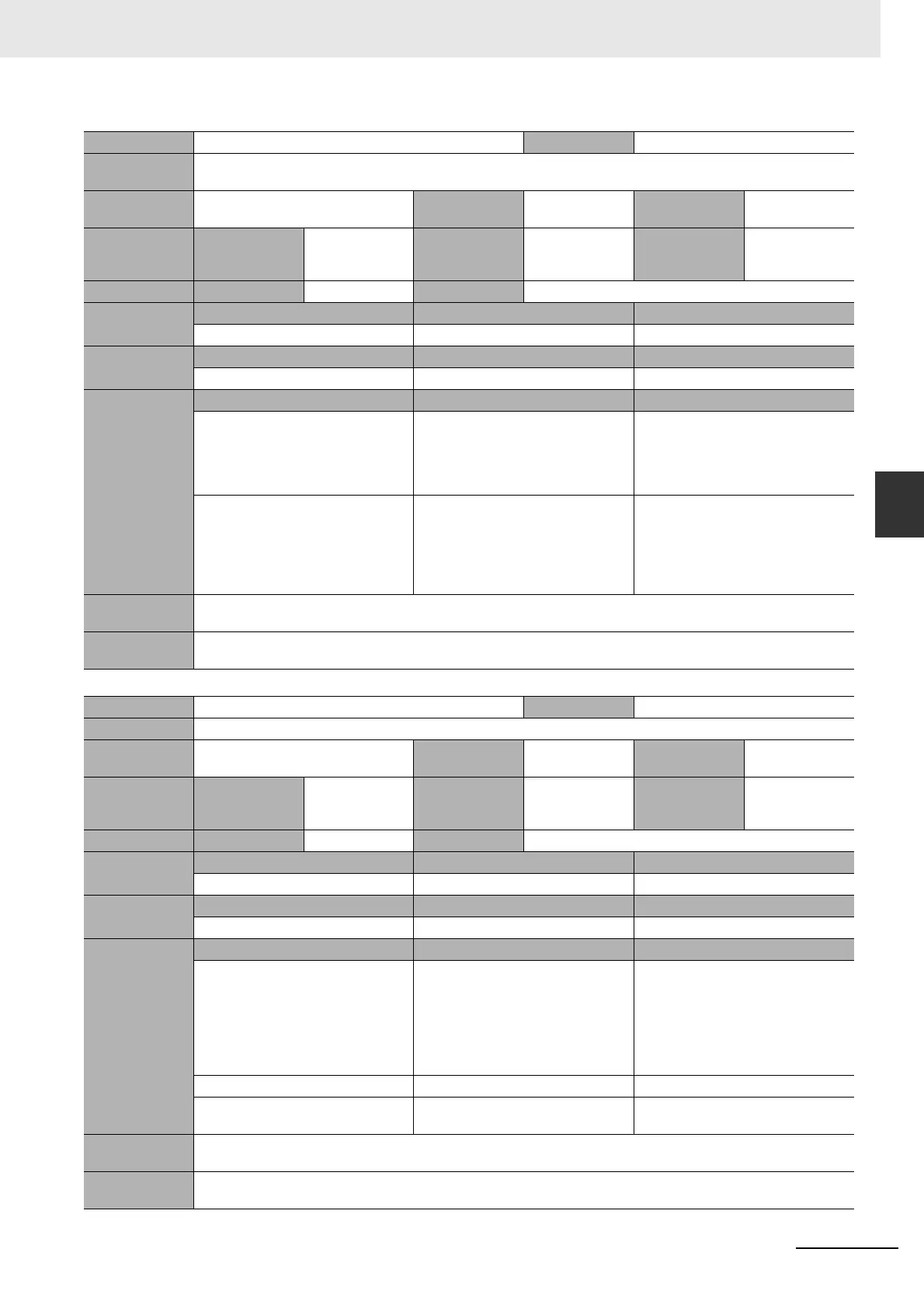
A-3-2 Error Description
Event name Excessive Velocity Error Event code 34E50000 hex
Meaning The difference between the internal position command velocity and the actual velocity (i.e., the velocity error) exceeded
the Excessive Velocity Error Setting (3602 hex).
Source EtherCAT Master Function Module Source details Slave Detection
timing
While power is
supplied to motor
Error attributes Level Minor fault Recovery Error reset (after
resetting slave
errors)
Log category System
Effects User program Continues. Operation Power drive circuit is OFF for relevant slave.
Indicators EtherNet/IP NET RUN EtherNet/IP NET ERR EtherNet/IP LINK/ACT
--- --- ---
System-defined
variables
Variable Data type Name
None --- ---
Cause and
correction
Assumed cause Remedy Prevention
Motor operation does not follow the
command.
Adjust the gain to improve the
following ability. Increase the
acceleration/deceleration time for the
internal position command velocity.
Adjust the gain to improve the
following ability. Increase the
acceleration/deceleration time for the
internal position command velocity as
much as possible.
The setting of the Excessive Velocity
Error Setting (3602 hex) is too small.
Increase the setting of the Excessive
Velocity Error Setting (3602 hex) to an
acceptable range. If there is no need
to monitor the velocity error, disable
detection of Excessive Velocity Error.
(3602 hex = 0)
Increase the setting of the Excessive
Velocity Error Setting (3602 hex) to an
acceptable range. If there is no need
to monitor the velocity error, disable
detection of Excessive Velocity Error.
(3602 hex = 0)
Attached
information
None
Precautions/
Remarks
“24” is displayed on the Servo Drive front panel and F124 is given as the AlarmCode (4001 hex)
Event name Overspeed Event code 34E60000 hex
Meaning The motor speed exceeded the value set on the Overspeed Detection Level Setting (3513 hex).
Source EtherCAT Master Function Module Source details Slave Detection
timing
While power is
supplied to motor
Error attributes Level Minor fault Recovery Error reset (after
removing slave
error)
Log category System
Effects User program Continues. Operation Power drive circuit is OFF for relevant slave.
Indicators EtherNet/IP NET RUN EtherNet/IP NET ERR EtherNet/IP LINK/ACT
--- --- ---
System-defined
variables
Variable Data type Name
None --- ---
Cause and
correction
Assumed cause Remedy Prevention
The velocity command value is too
large.
Reduce the velocity command value.
Adjust the input frequency, dividing
ratio, and multiplication ratio of the
command pulse.
Set the velocity command value so
that the number of motor speed does
not exceed the Overspeed Level
(3910 hex). Check the input
frequency, dividing ratio, and
multiplication ratio of the command
pulse.
There is overshooting. Decrease the gain. Do not make the gain too large.
The wiring is incorrect. Wire the external encoder correctly as
shown in the wiring diagram.
Wire the external encoder correctly as
shown in the wiring diagram.
Attached
information
None
Precautions/
Remarks
“26” is displayed on the Servo Drive front panel and F026 is given as the AlarmCode (4001 hex)

 Loading...
Loading...

