4-90
4-2 Function Mode
4
Functions
•If P/PI switching is selected in the multi-function input selection, proportional integral compensation
is enabled while the signal is off; proportional compensation is enabled while the signal is on.
If P/PI switching is not selected in multi-function inputs 1 to 8 (C001 to C008), proportional integral
compensation is enabled.
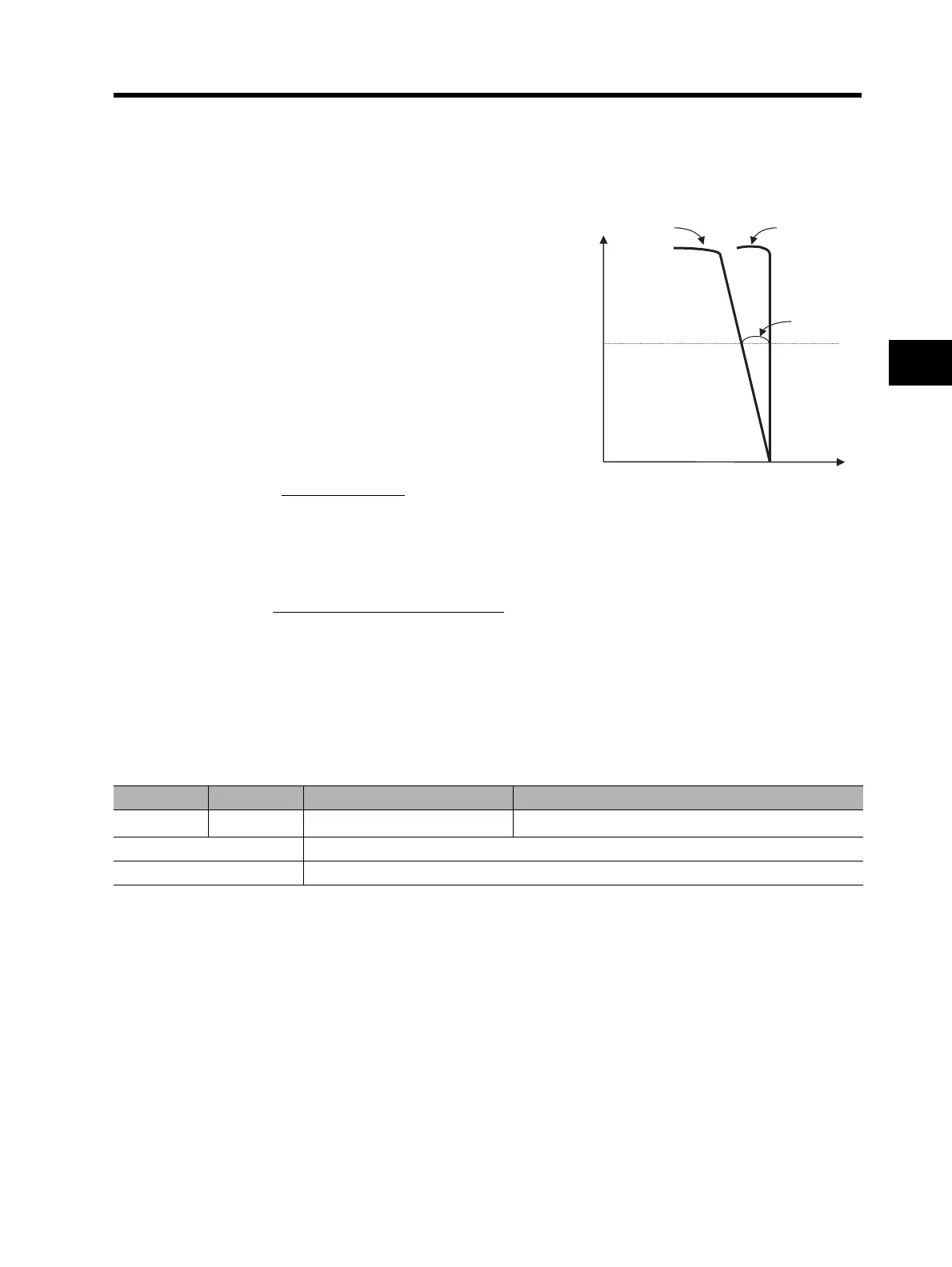
Normally, the Inverter performs proportional integral compensation
(PI control) for speed control so that the difference between
frequency reference and actual rpm becomes zero. If one load is
operated by several motors, however, proportional control (P
control) may be required. To enable proportional control (P
control), allocate the P/PI switching function to any of multi-
function input terminals S1 to S8 (set "43" in any of C001 to
C008) via the Digital Operator, and turn on the terminal. If you
choose to enable proportional control, set a "KPP" value in H052
(P proportional gain).
The relationship between the KPP value and speed change ratio
is expressed broadly in the following formula:
Forced Terminal Block Function (F-TM)
•This function forcibly enables operation via the control terminal block by turning on/off the multi-
function terminal if the frequency reference/RUN command sources are not set to the control
terminal block.
•If the Forced Terminal Block function is selected in the multi-function input selection, the Inverter
is operated with the signal from the frequency reference source and RUN command source
selected in A001 and A002, when the input signal is OFF. When the signal is ON, the Inverter is
forced to operate with the frequency reference or RUN command from the control circuit terminal
block.
•If you switch on/off this function during operation, the RUN command is reset to stop the Inverter
output. Before resuming operation, turn off the RUN command from each command source to
avoid possible danger and then input it again.
The relationship between speed change ratio and speed error is
expressed broadly in the following formula:
Torque
100%
0
P control
PI control
(A)
rpm
(Speed change ratio)
=
10
(KPP set value)
%
(Speed change ratio) =
Speed error at rated torque (A)
Synchronous rpm at base frequency
× 100%
Data Symbol Function name Description
51 F-TM Multi-function input selection Forced terminal
Available input terminals C001 to C008
Related codes A001, A002