MACHINE DESCRIPTION
Page 34 of 99 USER MANUAL PSPC UM-PSPC-06-E/10-2012
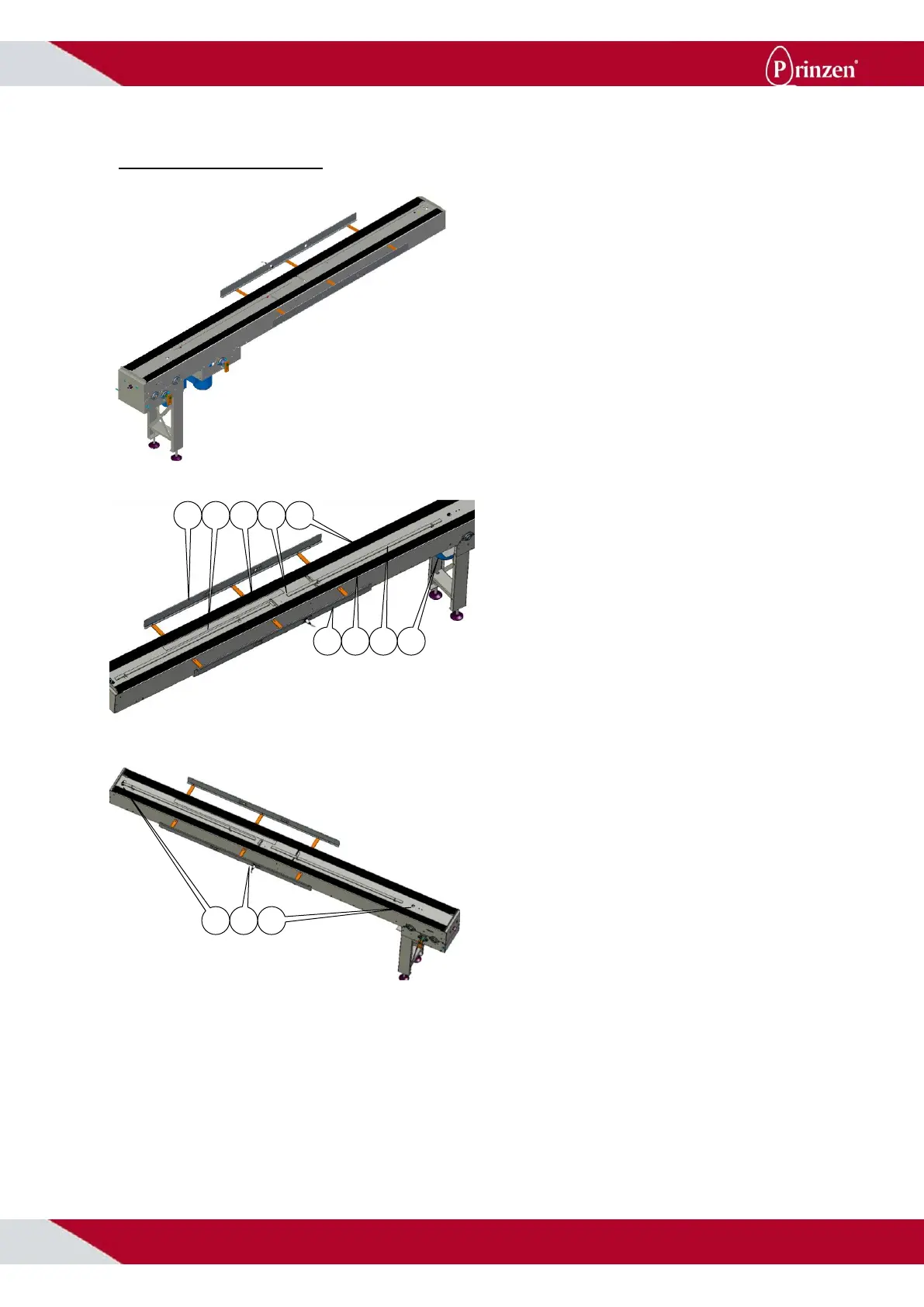
OUTPUT CONVEYOR
Use:
The output conveyor transports empty trays
from the denesters towards the tray set
position underneath the vacuum head, and full
trays towards the position where they are
manually or automatically removed.
Construction:
The output conveyor consists of:
1 Conveyor
2 30-cell tray guide
3 30-cell stopper
4 Hatch tray guides
5 Hatch tray stoppers
6 Drive mechanism
For fast changeover over of tray types by
means of repositioning of the output conveyor,
a mobile version of the output conveyor is
available.
This conveyor has 2 food with rollers instead of
the 1-fixed feet.
Process 30-cell tray:
When the start denester sensor (10) is OFF,
the denester drops a tray on the conveyor.
This tray is transported towards the 30-cell
stopper. As soon as the tray is detected by the
tray present sensor (11) the packer’s vacuum
head places the eggs into the tray. Now the
stopper releases the full tray while at the same
time stopping the next empty tray. The full tray
is transported towards the end of the conveyor
where it needs manual removal or automatic
removal by the easy stacker.
When the tray present sensor (11) turns OFF,
the stopper releases the waiting empty tray
and stops it again at the tray set position.
Process hatch tray:
A tray is automatically supplied after 5 cycles
of the vacuum head (125 of 150 eggs are
placed in the previous tray).
This tray is transported towards 1
st
hatch tray
stopper. As soon as the tray is detected by the
tray present sensor (11) the packer’s
combination vacuum head places the first 25
eggs into one side of the tray. Moves back to
the packer to pick up another 25 eggs and
places these eggs into the other side of the
tray. Then the 2
nd
hatch tray stopper moves up,
the 1
st
hatch tray stopper moves down and the
hatch tray is transported towards the 2
nd
stopper. Again the combination vacuum head
places 25 eggs in both sides of the tray. This
sequence is repeated for the last 50 eggs.
When the hatch tray is full, it is transported
towards the end of the conveyor, where it
needs manual removal (detected by a sensor
(12)).