User’s Manual 45
4.4.3 Serial Communication
Library files included with Dynamic C provide a full range of serial communications sup-
port. The RS232.LIB library provides a set of circular-buffer-based serial functions. The
PACKET.LIB library provides packet-based serial functions where packets can be delim-
ited by the 9th bit, by transmission gaps, or with user-defined special characters. Both
libraries provide blocking functions, which do not return until they are finished transmit-
ting or receiving, and nonblocking functions, which must be called repeatedly until they
are finished. For more information, see the Dynamic C User’s Manual and Technical
Note 213, Rabbit Serial Port Software.
Use the following function calls with the BL2100.
User interface to set up BL2100 serial communication lines. Call this function after serXOpen().
Whether you are opening one or multiple serial ports, this function must be executed after executing the
last serXOpen function AND before you start using any of the serial ports. This function is non-reentrant.
If Mode 1 is selected, CTS/RTS flow control is exercised using the serCflowcontrolOn and
serCflowcontrolOff functions from the RS232.LIB library.
PARAMETER
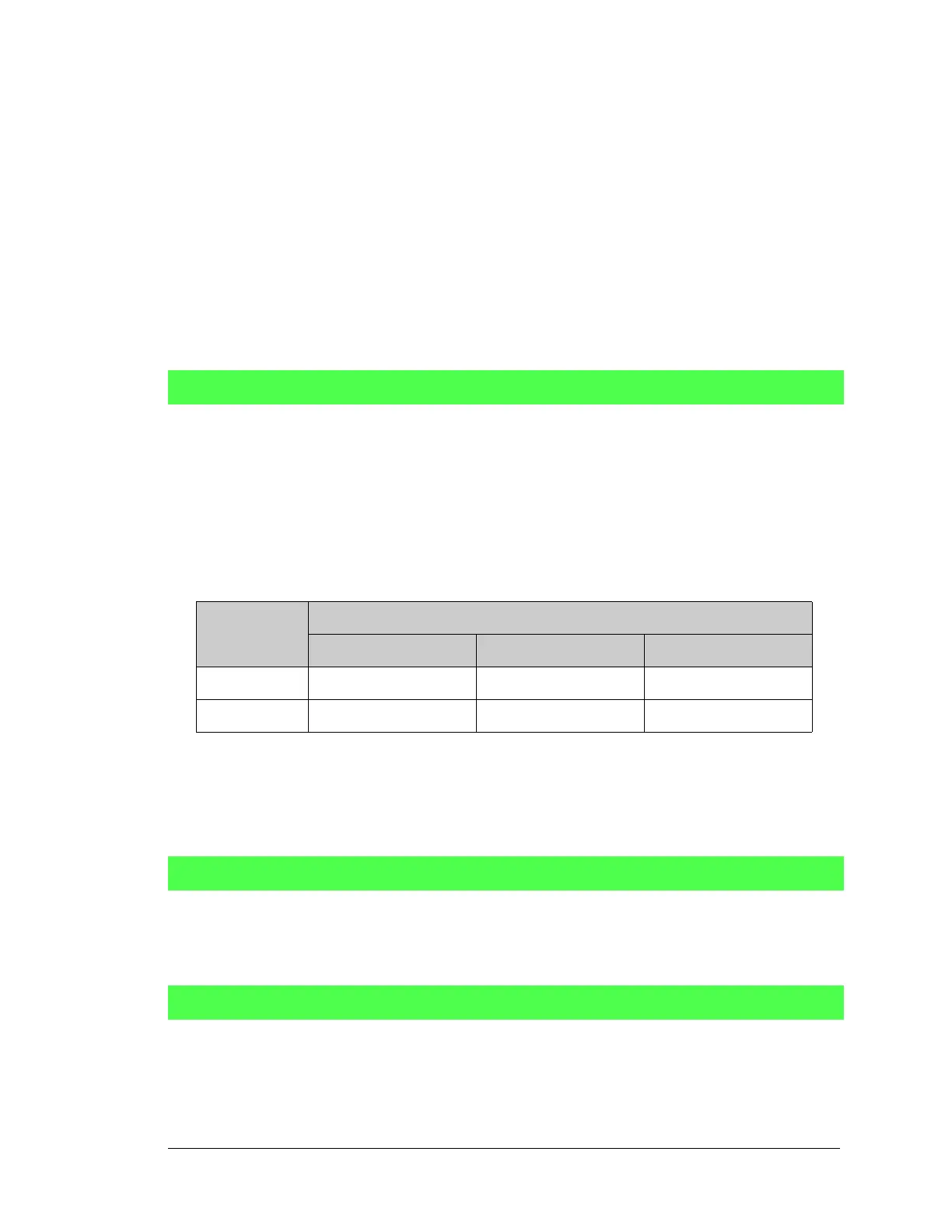
mode is the defined serial port configuration.
RETURN VALUE
0 if valid mode, 1 if not.
SEE ALSO
ser485Tx, ser485Rx
Sets pin 3 (DE) high to enable the RS-485 transmitter.
SEE ALSO
serMode, ser485Rx
Resets pin 3 (DE) low to disable the RS-485 transmitter.
SEE ALSO
serMode, ser485Tx,
serCflowcontrolOn, serCflowcontrolOff
int serMode(int mode);
Mode
Serial Port
B C D
0 RS-232, 3-wire RS-232, 3-wire RS-485
1 RS-232, 5-wire CTS/RTS RS-485
void ser485Tx(void);
void ser485Rx(void);