Output Power Dampening (OPdP)
The output power calculated by the PID controller can be dampened
(filtered) to reduce the controller output activity. Those processes with high
gain and/or derivative times or those processes with a relatively high noise
content can benefit from the dampening action.
OPdP - 0 to 250 seconds
The dampening parameter is expressed as a time constant in seconds.
Increasing the value increases the dampening or filtering effect. A value of
zero disables output power dampening. The amount of dampening to be used
depends primarily onthe response time of theprocess and theamount offinal
actuator activity desired. Generally, dampening times in the range of 1/20 to
1/50 of the controller’s integral time (or process time constant) prove to be
effective.Dampeningtimeslongerthan thesemaycausecontrollerinstability
due to the added lag effect of too much filtering.
In the case where a relatively high dampening time is desired, the
controller’s proportional band may be increased to restore an adequate
stability margin. The Auto-tune procedure of the controller sets the
dampening value appropriate to the characteristics of the process.
ON/OFF Control Hysteresis Band (CHYS)
The controller can be placed in the ON/OFF control mode by setting the
proportionalbandto 0.0%. Thecontrol hysteresisvalueaffects only themain
control output (OP1).
CHYS - 1 to 250 degrees
The hysteresis band should be set to a minimum value to eliminate output
chatteratthesetpoint.Generally,2°to 5°issufficient forthispurpose. Setthe
hysteresis band to a sufficient level prior to invoking Auto-Tune. Internal
cascadecontrollers, secondaryloop,have afixed hysteresisof1.5% ofscaled
range.
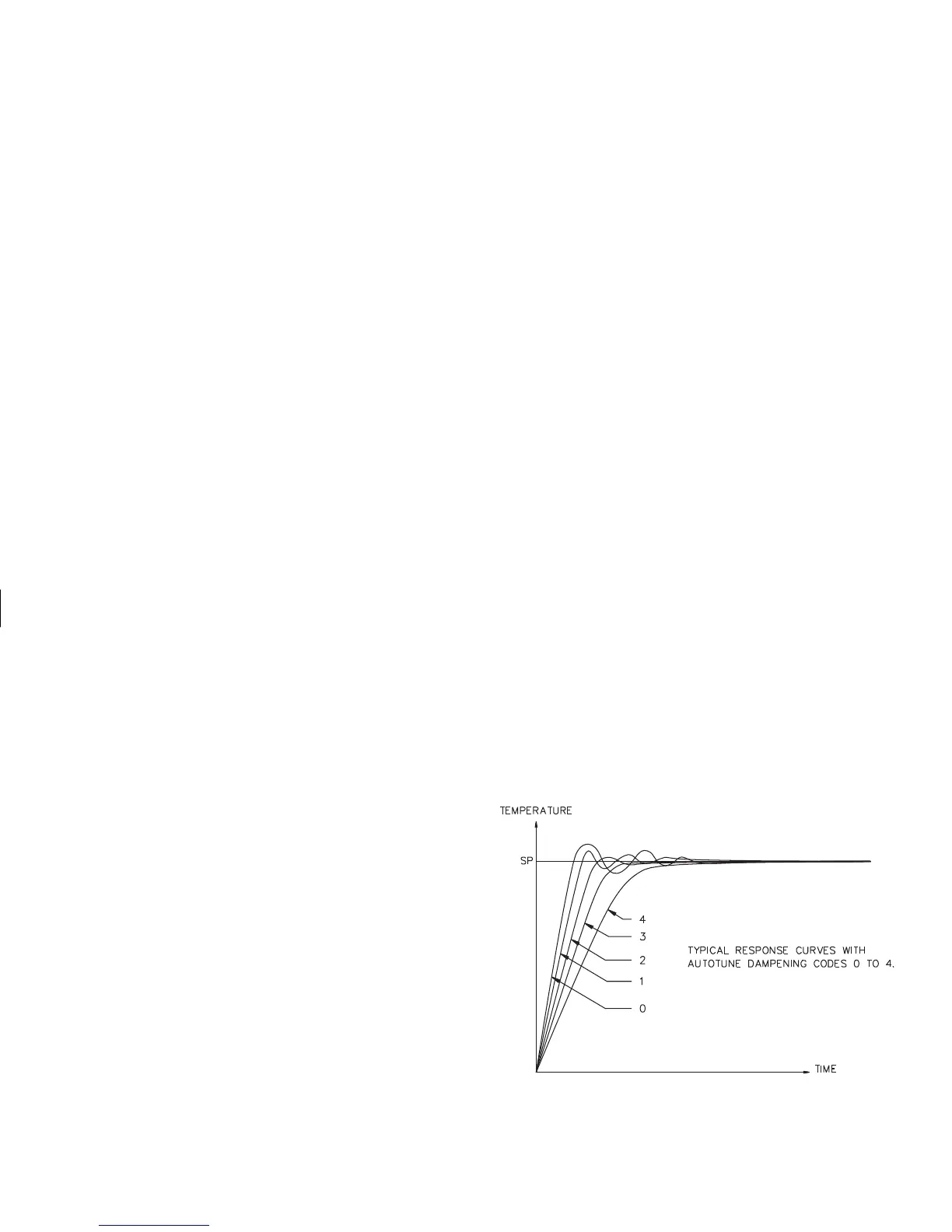
Auto-Tune Dampening Code (tcod)
Prior to invoking Auto-Tune,the dampening code should beset to achieve
the desired dampening level under PID control. After Auto-tune is complete,
changes to “tcod” parameter have no effect until Auto-tune is re-started.
When set to 0, this yields the fastest process response with possible
overshoot. A setting of 4 yieldsthe slowest response with the least amount of
overshoot. Dampening codes of 0 or 1 are recommended for most thermal
processes.
Figure 14, Dampening Code

 Loading...
Loading...
