AUTO-TUNE
Auto-Tuneisa userinitiatedfunction inwhichthecontrollerautomatically
determines the PID settings based upon the process characteristics. During
Auto-tune, the controller temporarily causes the system to oscillate by
cycling the output power from 0 to 100%. The nature of these oscillations
determines the settings of the controller’s parameters.
Note: If the induced oscillations caused by Auto-tune can cause system problems
or are otherwise unacceptable, the Step Response Manual Tuning Procedure
can be used as a tuning alternative.
Prior to initiating Auto-Tune, it is essential that the controller be
configured to the application. In particular, control hysteresis (CHYS) and
Auto-Tune dampening code (tcod) must be set in the Output Parameters
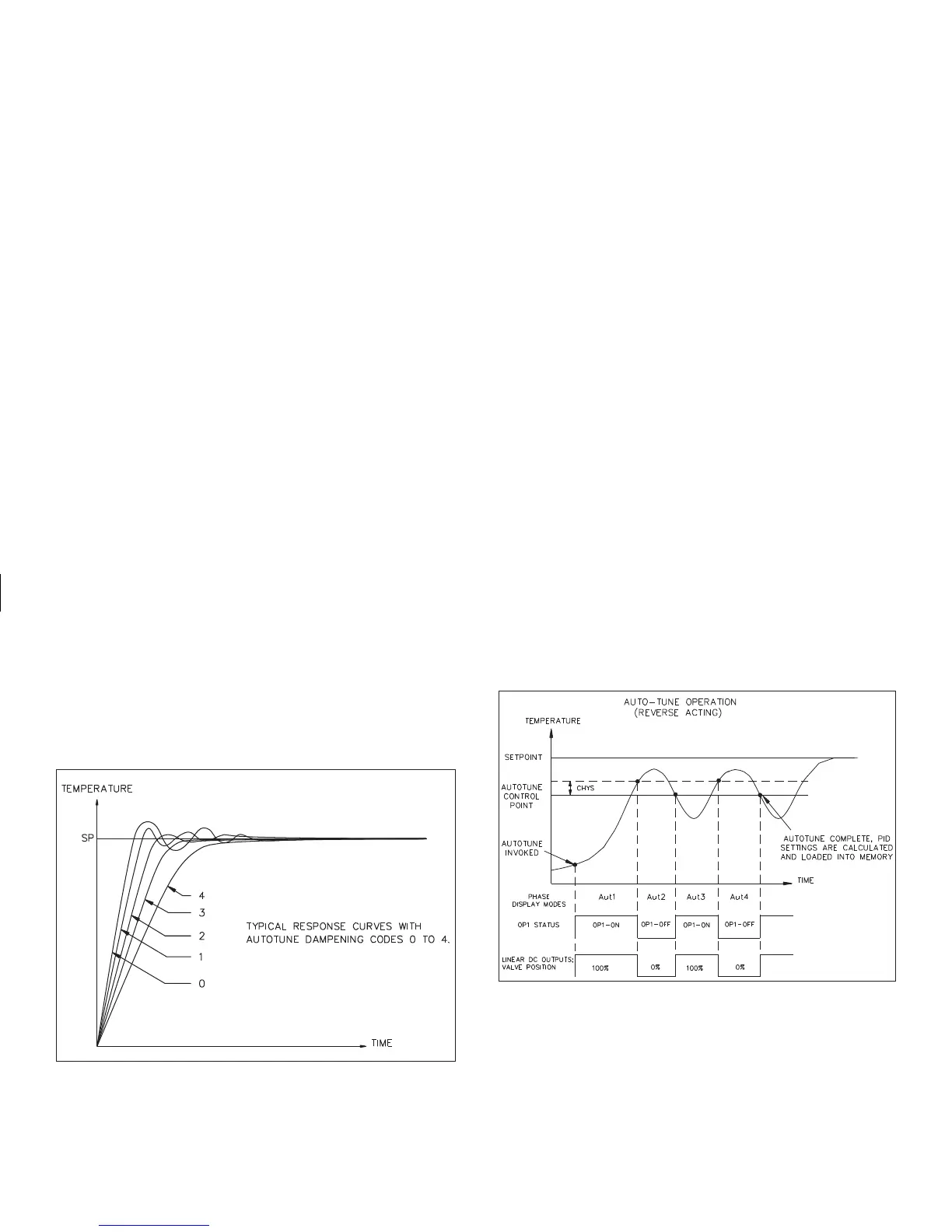
section. Generally, control hysteresis of 2 - 5 degrees is adequate. The
dampening code may be set to yield the response characteristics shown in
Figure 39, Dampening Code. A dampening code setting of zero gives the
fastest responsewith possible overshoot,and a codeof four gives theslowest
response with minimum overshoot.
The following controller parameters are set by Auto-tune according to the
characteristics of the process:
Proportional Band (ProP)
Integral Time (Intt)
Derivative Time (dErt)
Input Filter (Fltr)
Output Power Dampening (OPdP)
Figure 39, Dampening Code
Figure 40, Auto-Tune Operation

 Loading...
Loading...
