Robotiq Hand-E C10 Gripper Instruction Manual
INFO
Modbus RTU is a communication protocol based on a Big Endian byte order. Therefore, the 16-bit register
addresses are transmitted with the most significant byte first. However, the data port is in the case of
Robotiq products based on the Little Endian byte order. As such, the data parts of Modbus RTU messages
are sent with the less significant byte first.
TIP
Modbus RTUspecifications and details can be found at www.modbus.org.
4.7.1. Connection Setup
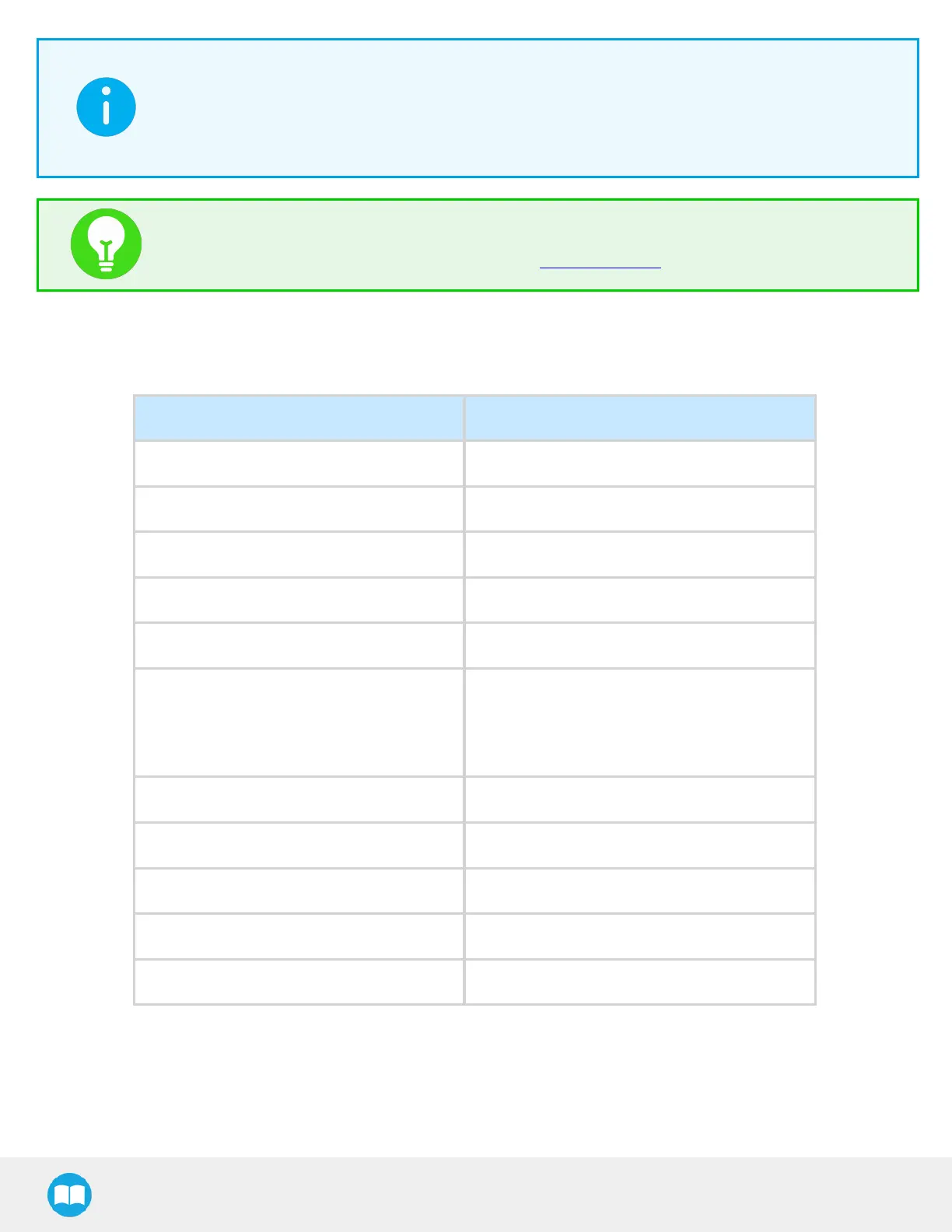
The following table describes the connection requirements for controlling the gripper using the Modbus RTU protocol.
PROPRIETY DEFAULT VALUE
Physical Interface
RS-485
1
Baud Rate
2
115,200 bps
Data Bits 8
Stop Bit
2
1
Parity
2
None
Supported Functions
Read Input Registers (FC04)
Preset Multiple Registers (FC16)
Master read & write multiple registers (FC23)
Exception Responses Not supported
Slave ID
2
0x0009 (9)
Robot Output / Gripper Input First Register 0x03E8 (1000)
Robot Input / Gripper Output First Register 0x07D0 (2000)
Termination Resistor
2
120 ohms
1
Various converters are available in the Spare Parts, Kits and Accessories section.
2
These parameters can be adjusted using the Robotiq User Interface.
Each register (word - 16 bits) of the Modbus RTU protocol is composed of 2 bytes (8 bits) from the gripper. The first gripper output
Modbus register(0x07D0) is composed from the first 2 Robotiq Gripper bytes (byte 0 and byte 1).
53