Robotiq Hand-E C10 Gripper Instruction Manual
INFO
200 Hz is the maximum speed when commanding / reading from the Robotiq Gripper. It is therefore
recommended to send commands with a minimum delay of 5 ms between them.
Maximum baud rate of ACC-ADT-USB-RS485 is 115200 bps.
120 Ohms termination resistor is already present on the converter and the Gripper. If multiple grippers are
connected in parallel on the same RS485 cable, termination resistor must be set to OFF in communication
parameters.
4.7.2. Read input registers (FC04)
Function code 04 (FC04) is used for requesting the status of the gripper analog input register. Examples of such data are gripper
status, object status, finger position, etc.
Example of an FC04 read function:
This message asks for register 0x07D0 (2000) and register 0x07D1 (2001) which contains Gripper Status, Object Detection, Fault
Status and Position Request Echo.
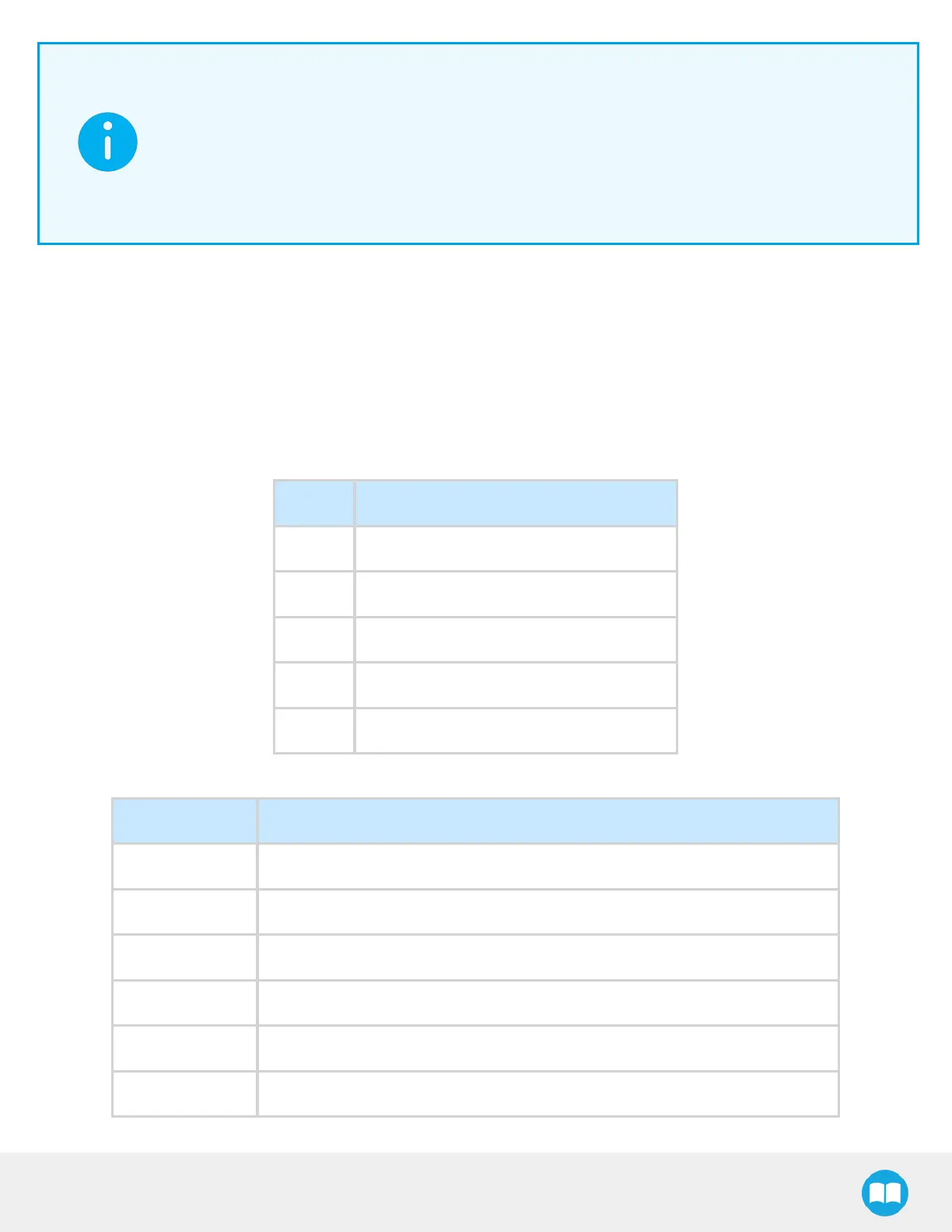
Request is: 09 04 07 D0 00 02 70 0E
Bits Description
09 SlaveID
04 Function Code 04 (Read Input Registers)
07D0 Address of the first requested register
0002 Number of registers requested (2)
700E Cyclic Redundancy Check (CRC)
Response is: 09 04 04 E0 00 00 00 45 84
Bits Description
09 SlaveID
04 Function Code 04 (Read Input Registers)
04 Number of data bytes to follow (2 registers x 2 bytes/register = 4 bytes)
E000 Content of register 07D0
0000 Content of register 07D1
4584 Cyclic Redundancy Check (CRC)
54