System design
Doc. # 177/52701
Rev. 3.3
Key switch fuse F2
Use a fuse rated for the larger of: A) the sum of the drive currents plus 1A for internal circuits,
and B) the capacitor pre-charge circuit. In the following example there are two contactors each
drawing 2 A:
Fuse choice: 7A.
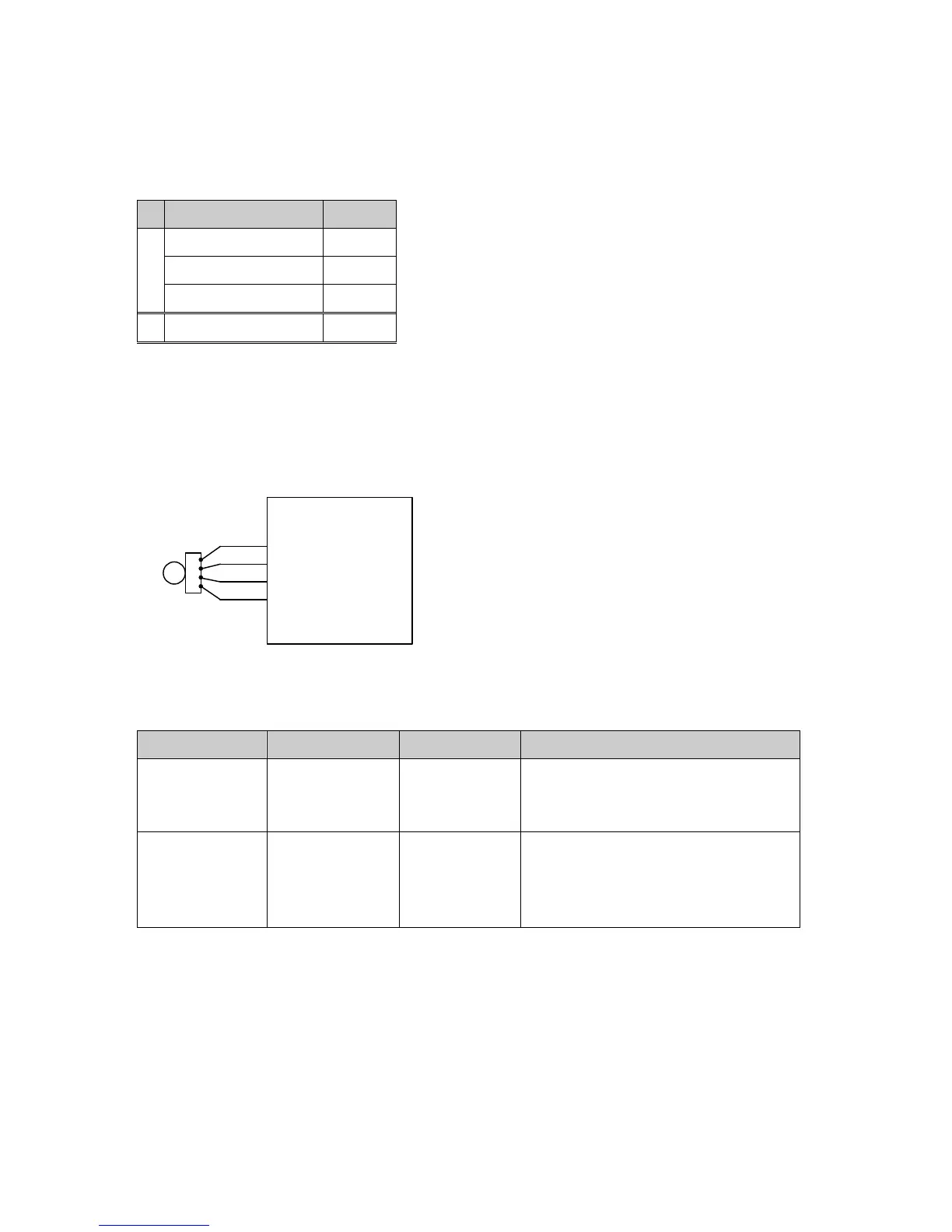
Motor speed sensor (encoder)
A 4-wire connection is provided for open-collector or current-source quadrature pulse encoder
devices (software configurable). These types of encoder are optimized for accurate speed
measurement, required for efficient control of induction motors.
E
AB Quadrature
Pulse Encoder
(pin numbering
may vary)
3
4
1
2
26
14
25
15
Gen4 Controller
+5/10V Supply
0 V
encoder A
encoder B
Figure 16 - Sample wiring for an AB quadrature speed encoder
You can use the following types of encoder, or equivalents:
Bearing Type
(SKF and FAG)
64 and 80 pulses per revolution
Dual quadrature outputs
Output low = 0 V (nominal)
80 pulses per revolution
Dual quadrature outputs
Output low = 7 mA
Output high = 14 mA
Single channel encoders (without the encoder B connection) are also supported. However, when
using this type of encoder, torque output is limited to the forward direction only. While these
encoders can be used for belt drive or pump motors, the torque output limitation makes these
unsuitable for traction applications.
The number of encoder pulses per revolutions (n) and the maximum motor speed (N) are related
to, and limited by, the maximum frequency of the encoder signal (f
max
). The following table shows
the maximum motor speed for a given encoder on a 4-pole motor.