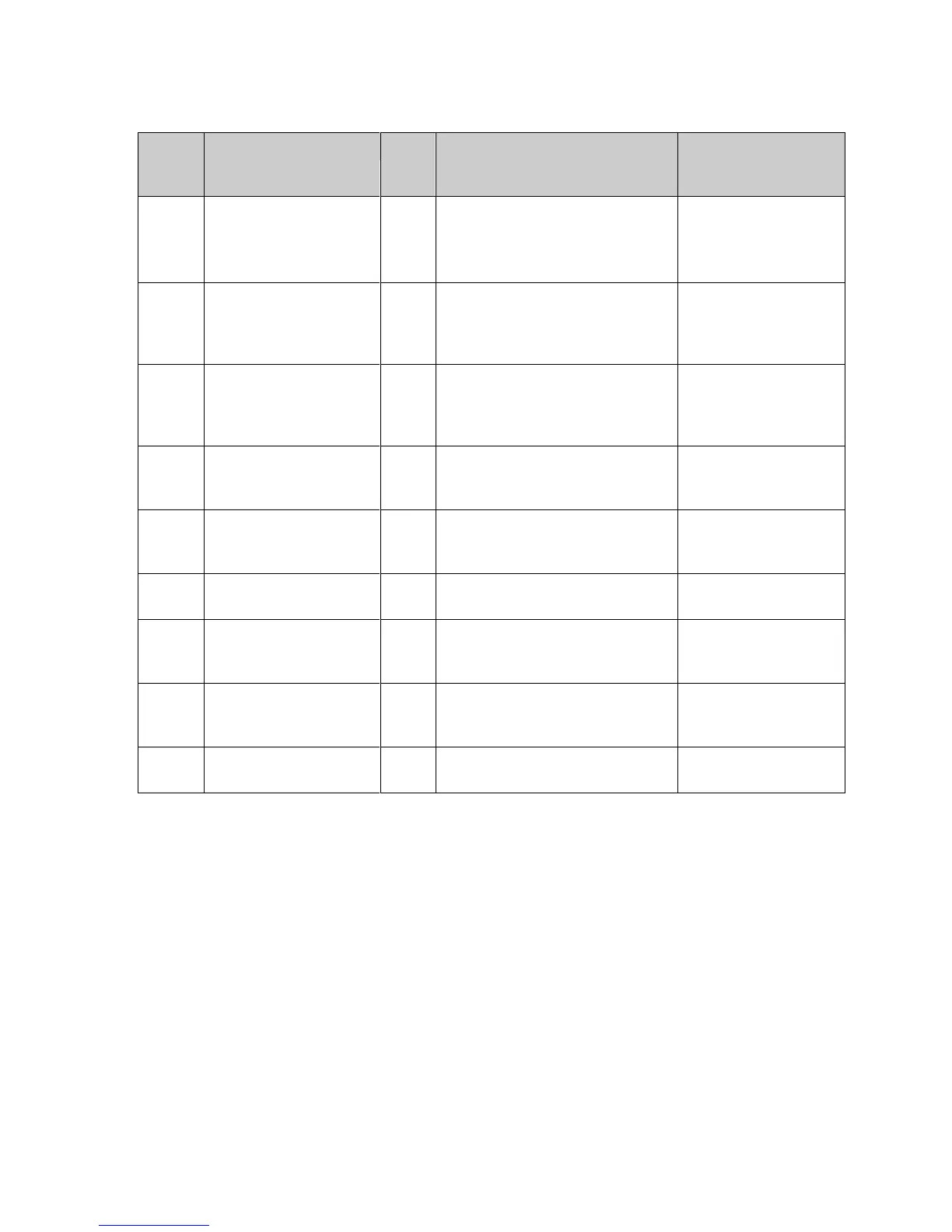
Speed measurement input wire-
off is detected.
Or encoder signals out of range
or misaligned.
Check encoder
wiring. Calibrate
analogue encoder
signals for sin/cos.
Software has detected an over
current condition
Check motor load
and wiring. Check
motor parameters are
correct.
Software is unable to control
currents on PMAC motor.
Check motor load
and wiring. Check
motor parameters are
correct.
Unrecoverable network
communication error has been
detected.
Check CANbus
wiring and CANopen
configuration.
Internal software or
hardware fault
Software run time error captured
or hardware variant not
recognised.
Current sensor auto-
zero fault
Current sensor voltage out of
range with no current.
Motor parameter written to while
motor control is operational.
Recycle keyswitch to
allow parameters to
be reloaded correctly.
3
rd
Party Anonymous
Node EMCY received
3
rd
party node has transmitted
an EMCY message.
Check CANbus
wiring and 3
rd
party
node status.
Vehicle service interval has
expired.
Service vehicle and
reset service hours.
Table 7 Fault identification
Fault list
Use DVT to access the Fault list. If you don’t have DVT you can use any configuration tool as
follows:
1. Object 5300
h
gives information about all active faults. Read sub-index 1 to get the number
of active faults. Write to sub-index 2 to select one of the active faults (0 = highest priority)
and read back sub-index 3 to read the fault ID at that index.
3. Object 5610
h
can be used to read a text description of the fault. Write the fault ID to sub-
index 1 and read back the fault description from sub-index 2.
Upgrading the controller software