255
4 Förberedande av roboten
4 Förberedande av roboten
4.1 Fastsättning av borstar
1. Säkerställ att apparaten är avstängd och att nätdelen
inte sitter i eluttaget.
2. Lägg apparaten försiktigt upp-och-ned, så att undersi-
dan är åtkomlig.
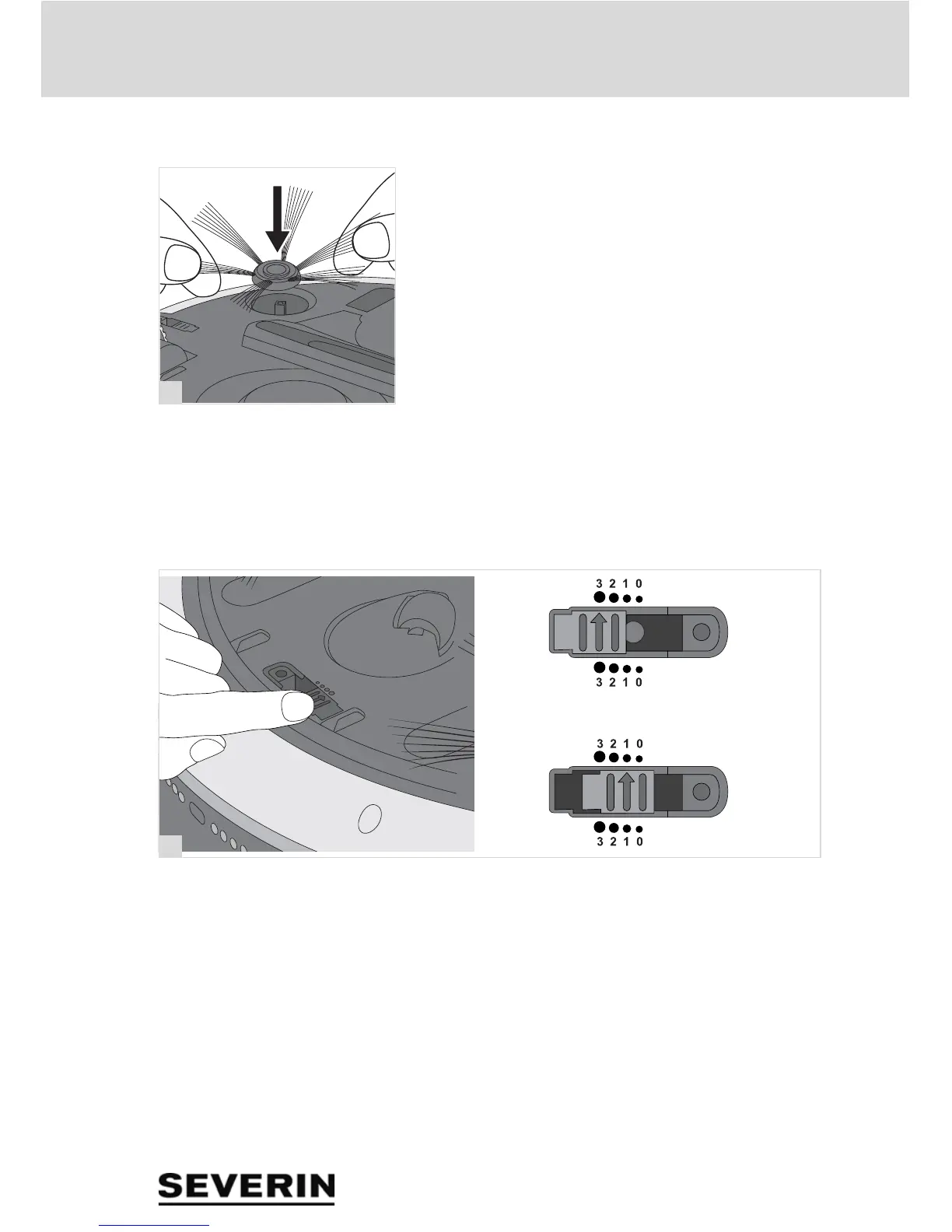
3. Sätt fast borstarna i borstfästet (Bild 5).
4.2 Inställning av fallsensorer
Genom fallsensorerna kan roboten själv identifiera trappsteg
och avsatser, varför den inte kör ner där. Eftersom fallsenso-
rerna kontrollerar underlaget, måste även golvets ljusstyrka
beaktas vid inställningen av sensorerna.
1. Säkerställ att apparaten är avstängd och att nätdelen
inte sitter i eluttaget.
2. Lägg apparaten försiktigt upp-och-ned, så att undersi-
dan är åtkomlig.
3. Sätt alla 3 fallsensorerna i samma läge (Bild 6):
– Läge ”0”-”1” för ljusa golv och låga nivåskillnader
– Läge ”2”-”3” för mörka golv och höga nivåskillnader
TIPS: Ställ in läge ”3”, om apparaten kör bakåt hela tiden på
mörka golv.