95
4 Préparation du robot
4 Préparation du robot
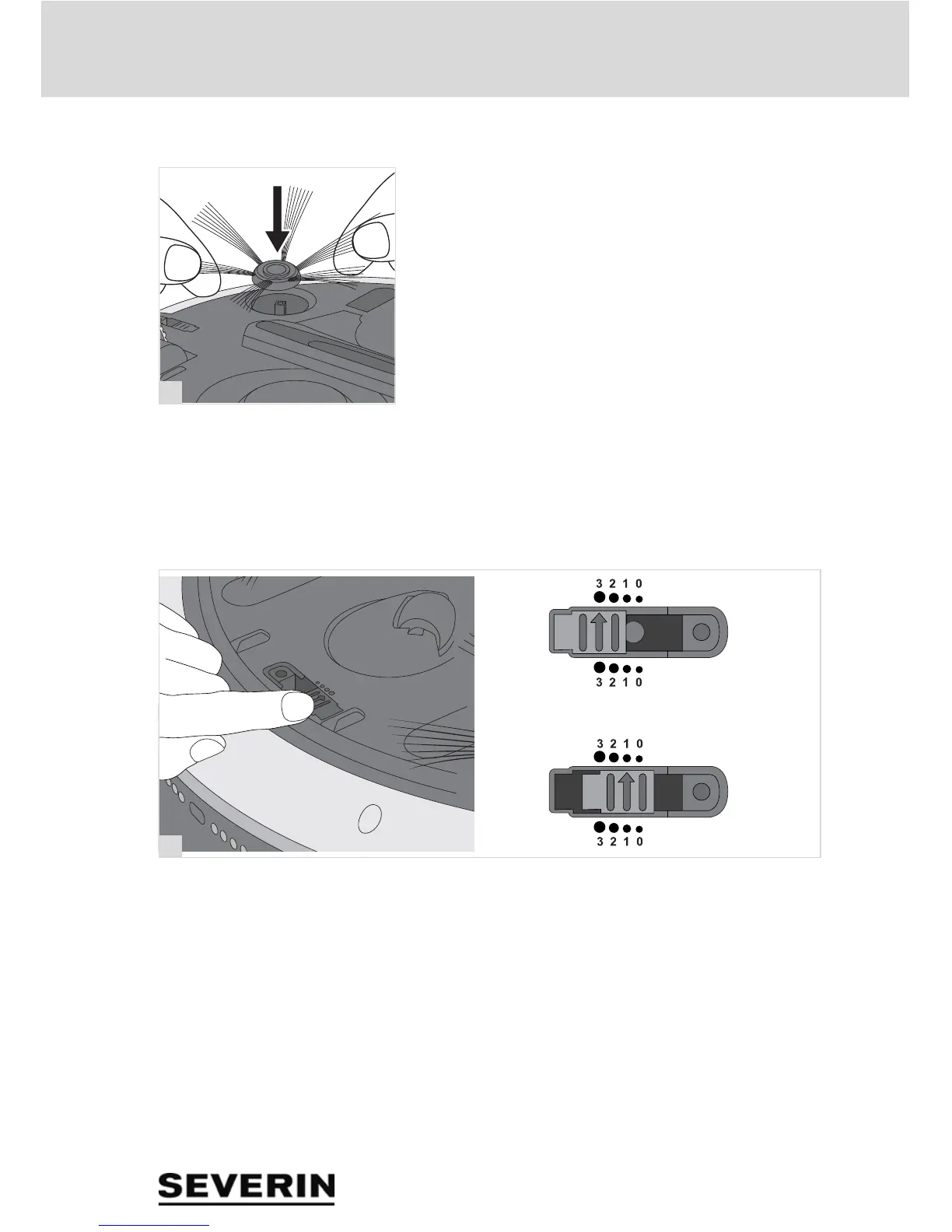
4.1 Mise en place de la brosse
1. Assurez-vous que l'appareil est éteint et que le bloc d'ali-
mentation n'est pas branché.
2. Retournez prudemment l'appareil pour pouvoir accéder
au dessous.
3. Enfoncer la brosse sur la fixation (fig. 5).
4.2 Réglage des capteurs antichute
Grâce aux capteurs antichute, le robot peut détecter tout seul
les marches et les escaliers, et ne tombe pas. Comme les
capteurs antichute contrôlent la surface, il faut aussi tenir
compte de la luminosité du sol pour régler les capteurs.
1. Assurez-vous que l'appareil est éteint et que le bloc d'ali-
mentation n'est pas branché.
2. Retournez prudemment l'appareil pour pouvoir accéder
au dessous.
3. Mettre les 3 capteurs antichute simultanément sur la
même position (fig. 6) :
– Pour les sols clairs et les niveaux faibles, position 0 à 1.
– Pour les sols foncés et les niveaux élevés, position 2 à 3.
CONSEIL : Si le robot fonctionne en permanence en marche
arrière sur un sol foncé, choisissez le niveau « 3 ».