Functional description L6470
22/64 Doc ID 16737 Rev 2
6.7 Motor control commands
The L6470 can accept different types of commands:
● constant speed commands (Run, GoUntil, ReleaseSW),
● absolute positioning commands (GoTo, GoTo_DIR, GoHome, GoMark),
● motion commands (Move),
● stop commands (SoftStop, HardStop, SoftHiz, HardHiz).
For detailed command descriptions refer to Section 9.2 on page 52.
6.7.1 Constant speed commands
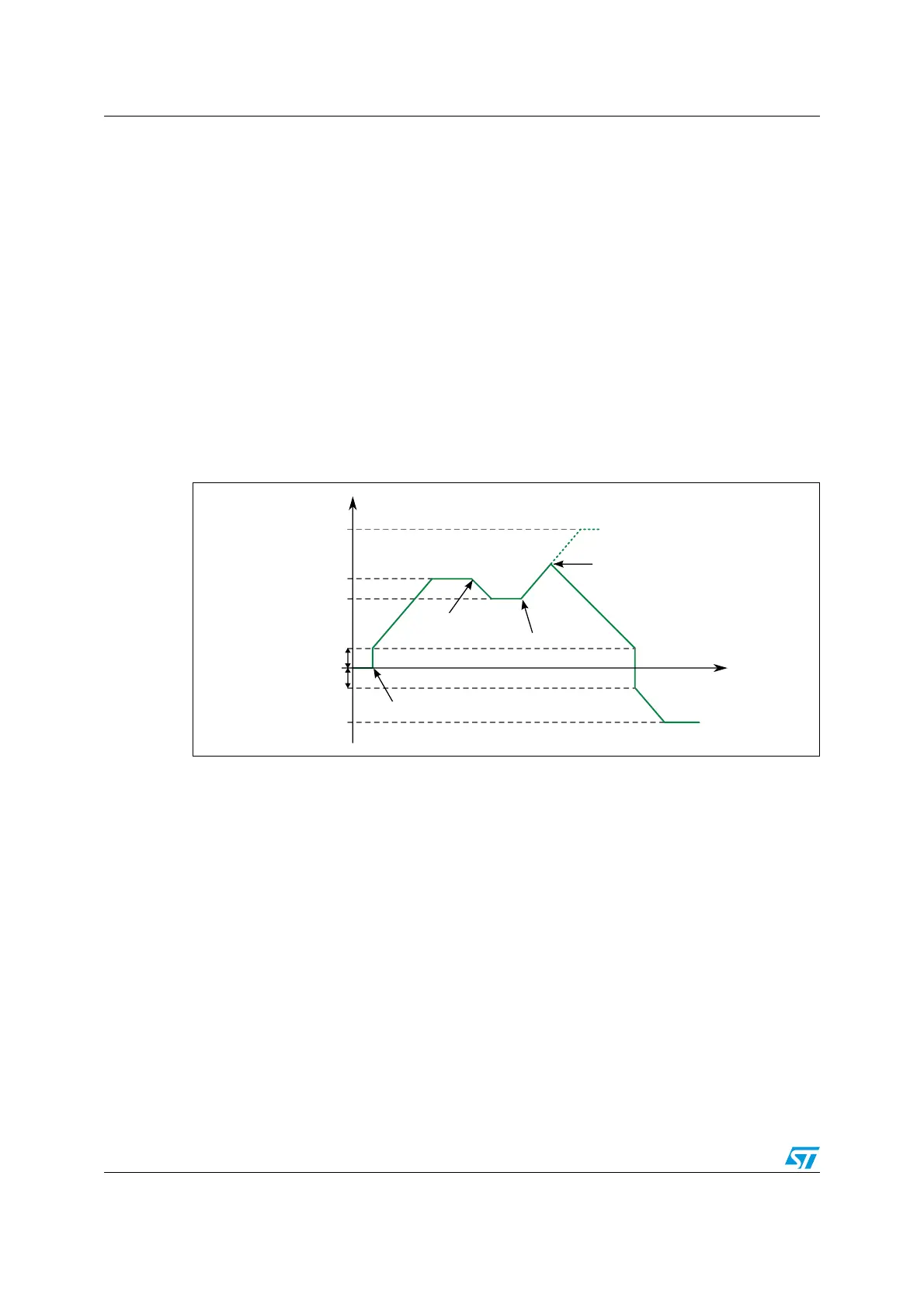
A constant speed command produces a motion in order to reach and maintain a user-
defined target speed starting from the programmed minimum speed (set in MIN_SPEED
register) and with the programmed acceleration/deceleration value (set in ACC and DEC
registers). A new constant speed command can be requested anytime.
Figure 7. Constant speed commands examples
6.7.2 Positioning commands
An absolute positioning command produces a motion in order to reach a user-defined
position that is sent to the device together with the command. The position can be reached
performing the minimum path (minimum physical distance) or forcing a direction (see
Figure 8).
Performed motor motion is compliant to programmed speed profile boundaries
(acceleration, deceleration, minimum and maximum speed).
Note that with some speed profiles or positioning commands, the deceleration phase can
start before the maximum speed is reached.
!-V
30$
30$
30$
30$
2UN30$&7
TIME
3PEED
S
TEPFREQUENCY
2UN30$&7
2UN30$&7
2UN30$"7
-INIMUM
SPEED
-INIMUM
SPEED