Programming manual L6470
52/64 Doc ID 16737 Rev 2
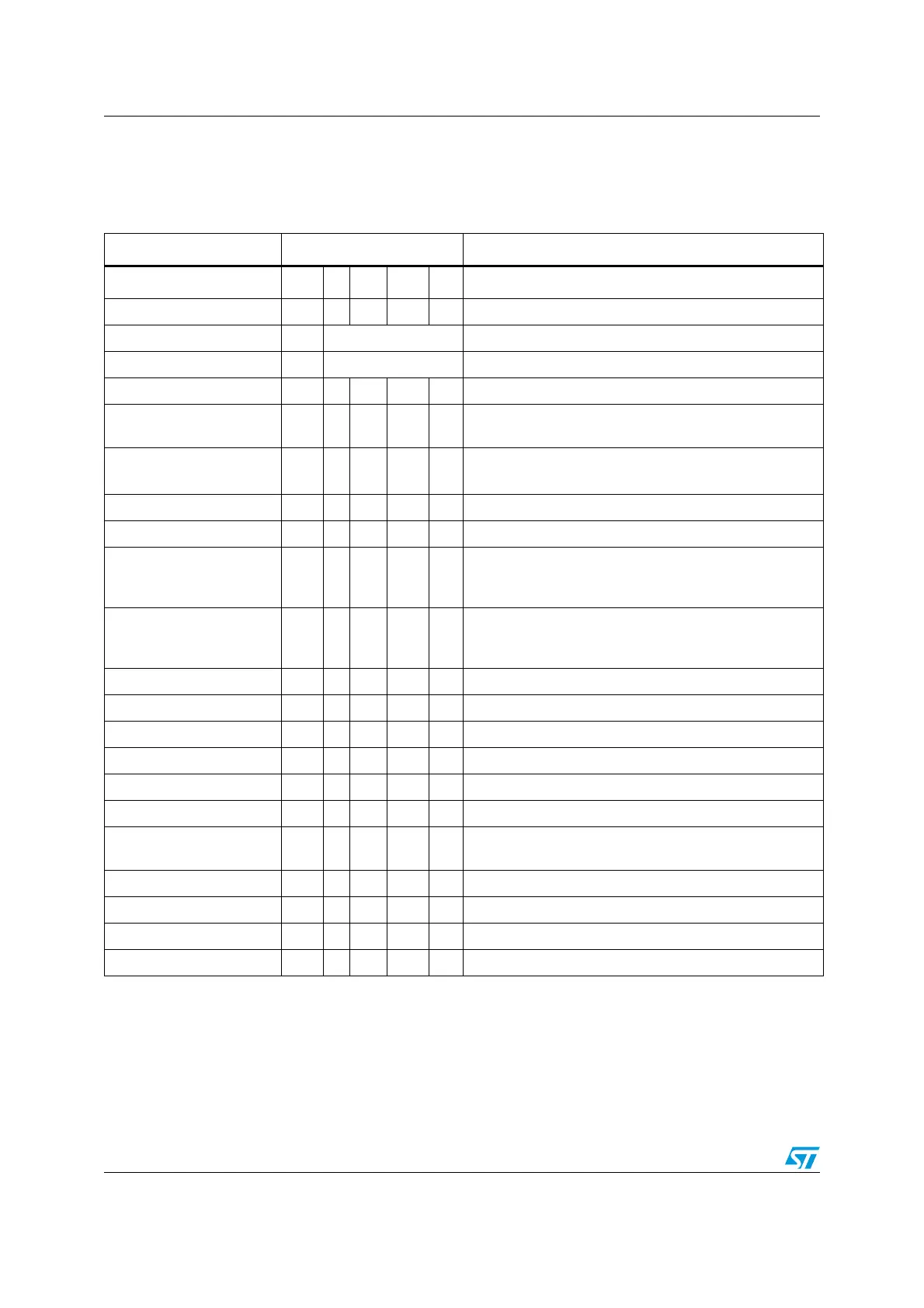
9.2 Application commands
The commands summary is given in the Tabl e 36 .
Table 36. Application commands
Command Mnemonic Command binary code Action
[7..5] [4] [3] [2..1] [0]
NOP 000 0 0 00 0 Nothing
SetParam(PARAM,VALUE) 000 [PARAM] Writes VALUE in PARAM register
GetParam(PARAM) 001 [PARAM] Returns the stored value in PARAM register
Run(DIR,SPD) 010 1 0 00 DIR Sets the target speed and the motor direction
StepClock(DIR) 010 1 1 00 DIR
Put the device in step clock mode and impose DIR
direction
Move(DIR,N_STEP) 010 0 0 00 DIR
Makes N_STEP (micro)steps in DIR direction
(Not performable when motor is running)
GoTo(ABS_POS) 011 0 0 00 0 Brings motor in ABS_POS position (minimum path)
GoTo_DIR(DIR,ABS_POS) 011 0 1 00 DIR Brings motor in ABS_POS position forcing DIR direction
GoUntil(ACT,DIR,SPD) 100 0 ACT 01 DIR
Perform a motion in DIR direction with speed SPD until
SW is closed, the ACT action is executed then a SoftStop
takes place
ReleseSW(ACT, DIR) 100 1 ACT 01 DIR
Performs a motion in DIR direction at minimum speed
until the SW is released (open), the ACT action is
executed then a HardStop takes place
GoHome 011 1 0 00 0 Brings the motor in HOME position
GoMark 011 1 1 00 0 Brings the motor in MARK position
ResetPos 110 1 1 00 0 Resets the ABS_POS register (set HOME position)
ResetDevice 110 0 0 00 0 Device is reset to power-up conditions.
SoftStop 101 1 0 00 0 Stops motor with a deceleration phase
HardStop 101 1 1 00 0 Stops motor immediately
SoftHiZ 101 0 0 00 0
Puts the bridges in High Impedance status after a
deceleration phase
HardHiZ 101 0 1 00 0 Puts the bridges in High Impedance status immediately
GetStatus 110 1 0 00 0 Returns the status register value
RESERVED 111 0 1 01 1 RESERVED COMMAND
RESERVED 111 1 1 00 0 RESERVED COMMAND