STEP
iAStar Frequency Inverter For Elevator Door Machine manual Instructions
33
F53 Direction of encoder range:0 / 1
F53 = 0,same as the motor running direction
F53 = 1,opposite to the motor running direction
F54 Encoder pulse range:4-1023
Encoder setting, number of pulse per rotate of the encoder. Encoder parameters
must be correctly set in order to guarantee the good performance of the inverter.
F55 Motor slip frequency range:0.00-6.00
Motor slip frequency caculated acoording to the nameplate parameters of the
driving motor.
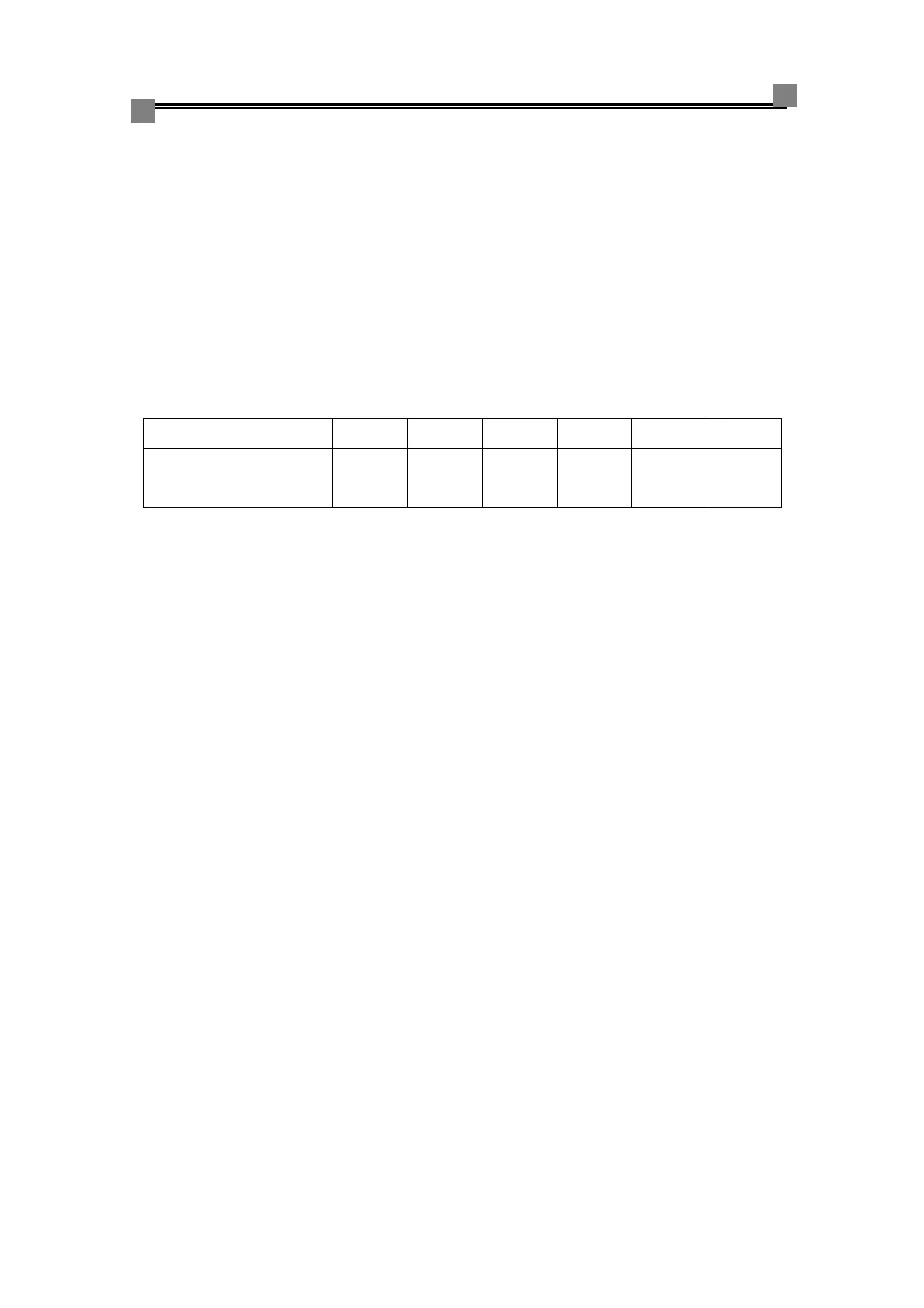
Synchronous rotate speed of motor:
pole 2 4 6 8 10 12
Synchronous rotate
speed /Hz(rpm)
60 30 20 15 12 10
example:shown on the nameplate of motor:20Hz / 530rpm
real rotate speed of motor is 530/20=26.5rpm。according to the table above,
choose value that close to the caculates value , calculate as the following:
pole of moter is 4,real Synchronous rotate speed of motor is 30rpm,rotate
differences of motor is 20×30-530=70rpm,so the rotate differences frequency of
motor is 70/30=2.33Hz。
F56 Debugging select (factory set)
F57 Debugging running direction (factory set)
F58 Debugging running speed(factory set)
F59 Test method(factory set)
F64 E
nable compensating torque range:0/99
F64=0: F65~F69 void;
F64=99:F65~F69 vailable。
F65 C
ompensating torque coefficient 1 range:10~50
compensating torque in low speed(<2Hz) in mode V/F
F66 Compensating torque coefficient 2 range:10~50
compensating torque in low speed(<4Hz) in mode V/F。
F67 Ccompensating torque coefficient 3 range:10~50
compensating torque in low speed(<6Hz) in mode V/F。
F68 Compensating torque coefficient 4 range:10~50
compensating torque in low speed(<8Hz) in mode V/F。
F69 Compensating torque coefficient 5 range:20~60
compensating torque in low speed(<10Hz) in mode V/F。