In the third level menu, if the parameter has no ash bit, it means the function code cannot be
changed and the possible reasons are:
This parameter of this function code cannot be changed, such as the actually detected 1)
parameter and running record parameter.
This function code cannot be changed in operating status and can only be changed when 2)
the controller is stopped.
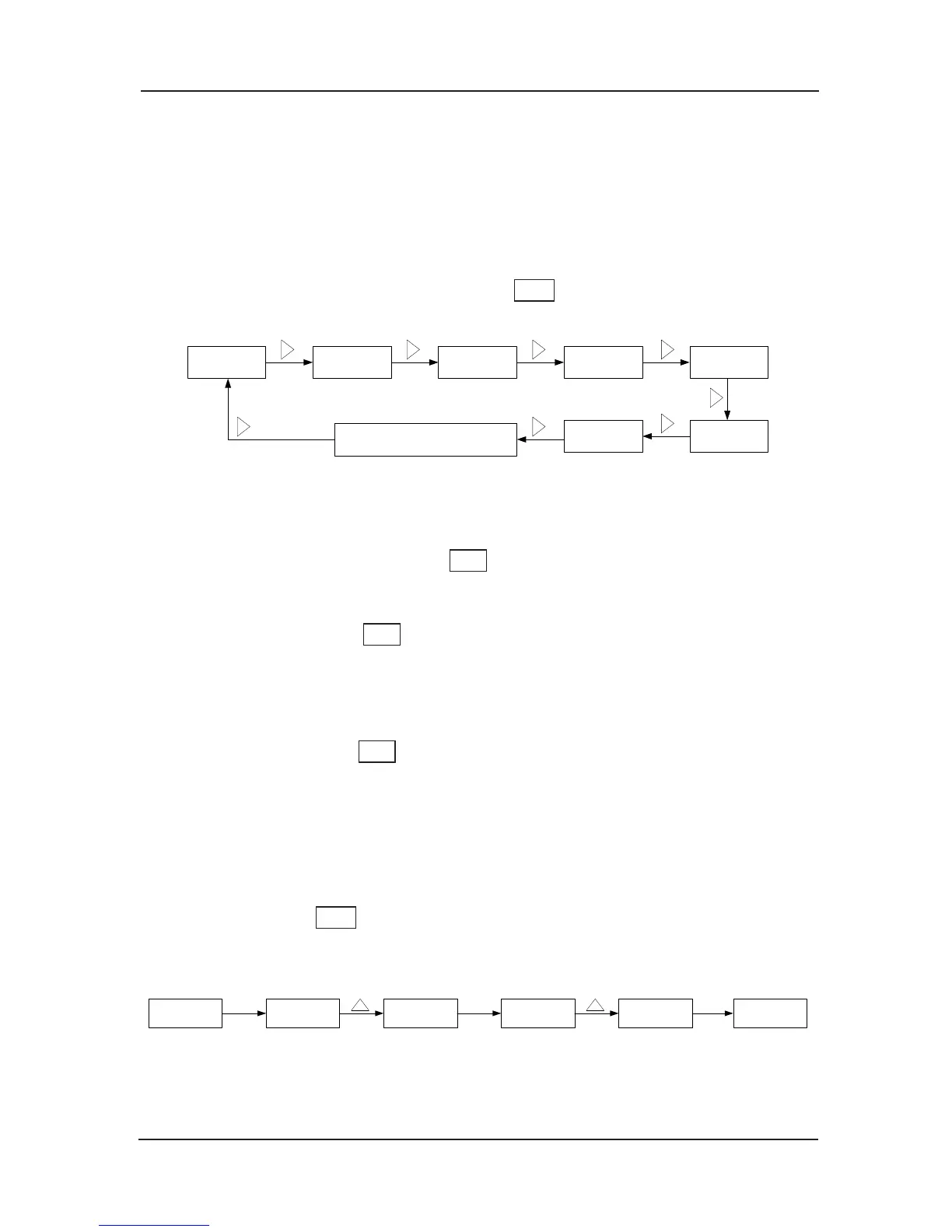
To shift the status dis
play parameters by key �>> a)
Example:
Fig 3-25 Example of Parameter Changing in Stopping State
In stopping and running status, the LED can display several status parameters, Whether to
display the status parameters is dependent on the bit setting of FA-01 (running parameter) and
FA-02 (stopping parameter). Through key�>> , user can shift the display in sequence and
display the stopping or running status parameters circularly.
In stoppi
ng state, there are 12 status parameters for NICE3000, user can shift to display the
parameters circularly by key �>>�. The parameters are: rated speed, bus voltage, low bit
of input terminal, high bit of input terminal, output terminal, currently oor, currently place, car
load, decelerate distance of rated speed, car top input state, car top output state and system
state. Users can select the de
sired parameters through the bit of FA-02.
In running state, there are 16 state parameters for NICE3000. Users can shift to display the
parameters circularly by key �>>�. The parameters are: running speed, rated speed, bus
voltage, output voltage, output current, output frequency, low bit of input terminal, high bit of
input terminal, output terminal, currently oor, currently place, car load, inpu
t of CTB-A, output
of CTB-A, system state, and advance torque current. Users can select the desired parameters
through the bit of FA-01.
Error information reading 3)
When error occurs in the controller, the error information will be displayed on the panel. It is
convenient to find reasons for the error and get rid of the error as soon as possible.
The controller can save the last 11 error codes. User
s can read the first error code in the
following way:
 Loading...
Loading...