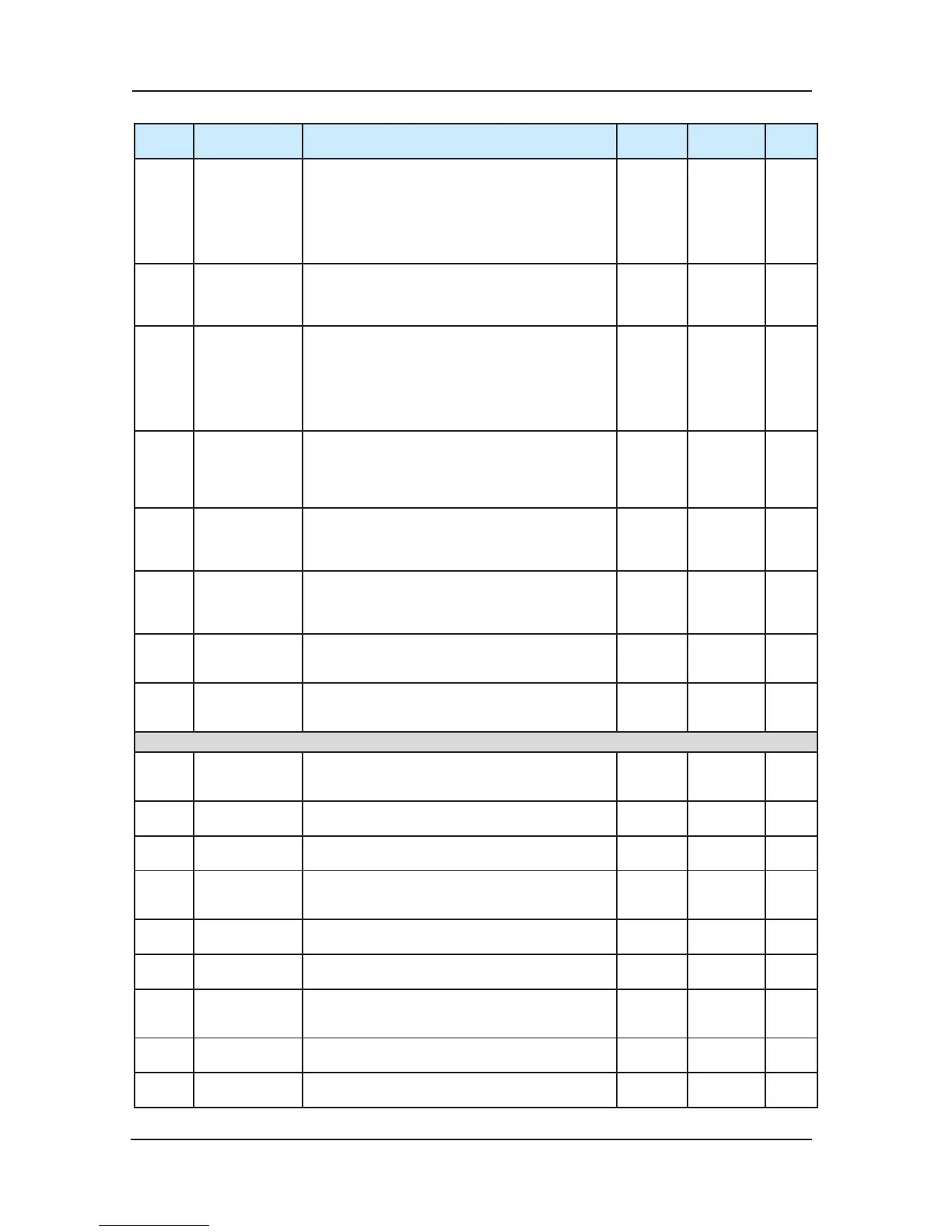
Function
Code
Name Setting Range Min. Unit Default
Modifi-
cation
F1-06
Stator resistance
(Asynchronous
motor)
Encoder original
angle
(Synchronous
motor)
0.000~30.000Ω
0~359.9°
0.001Ω
0.1°
Depending
on the
model
☆
F1-07
Rotor
resistance
Power-removal
angle (sync)
0.000~30.000Ω
0-359.9
0.001Ω
0.1
Depending
on the
model
☆
F1-08
Leakage
inductance
(Asynchronous
motor)
Wire connection
(Synchronous
motor)
0.00~300.00mH
0~15
0.01mH
0.
01
Depending
on the
model
☆
F1-09
Mutual
inductance
ADC sampling
delay
function(sync)
0.1~3000.0mH
0.00-40.00
0.1mH
0.00
Depending
on the
model
☆
F1-10
No-load current
Encoder test
selection(sync
motor)
0.01~300.00A
0~31
0.01A
01
Depending
on the
model
☆
F1-11
Auto-tuning
selection
0:No operation
1:motor tuning with load
2:motor tuning without load
3: shaft auto-tuning
1 0 ★
F1-12
Encoder pulse
number per
rotation
0~10000 1 1024
★
F1-13
Encode failure
monitoring
times
0.0~10.0s
Less than 1s, monitoring function not valid
0.1s 2.1s ★
F2 Vector Control Parameters
F2-00
Proportional
gain 1 of speed
loop
0~100 1 40 ☆
F2-01
Integration time
1 of speed loop
0.01~10.00s 0.01S 0.60S ☆
F2-02
Switching
frequency 1
0.00~F2-05 0.01Hz 2.00Hz ☆
F2-03
Proportional
gain 2 of speed
loop
0~100 1 35 ☆
F2-04
Integration time
2 of speed loop
0.01~10.00s 0.01s 0.80s ☆
F2-05
Switchin
g
frequency 2
F2-02~F0-06 0.01Hz 5.00Hz ☆
F2-06
Proportional
gain of current
loop
10~500 1 60 ☆
F2-07
Integral gain of
current loop
10~500 1 30 ☆
F2-08
Upper limit of
torque
0.0~200.0% 0.1% 150.0% ☆
 Loading...
Loading...