AFMS N°D01 FOR GARMIN GFC700 AUTOPILOT INSTALLATION AND
RNAV/RNP NAVIGATION ELIGIBILITY
AUTOPILOT FUNCTIONS
When the aircraft reaches the engagement limit, ESP ramps up the servo torque
command to adjust the aircraft back toward zero pitch attitude. ESP uses a rate
command to drive the attitude back to the nominal range and does not try to con-
trol to a specific attitude. As the pitch attitude returns to the nominal range, the
torque and pitch rate are reduced until the aircraft reaches the disengagement limit
at which time ESP turns off. The disengagement threshold is sized so that the
transition from ESP being active to being inactive is transparent to the pilot (no
transient when ESP turns off).
If, when ESP engages, the aircraft continues to pitch away from the nominal atti-
tude range the torque command will increase with increasing pitch deviation.
Above the upper disengagement limit specified in the certification gain file ESP
will be disabled.
13.1.2 ROLL MODE
Roll mode is similar to pitch mode and also utilizes configurable gain file parame-
ters to define engagement and disengagement limits as well as the speed and
torque curves.
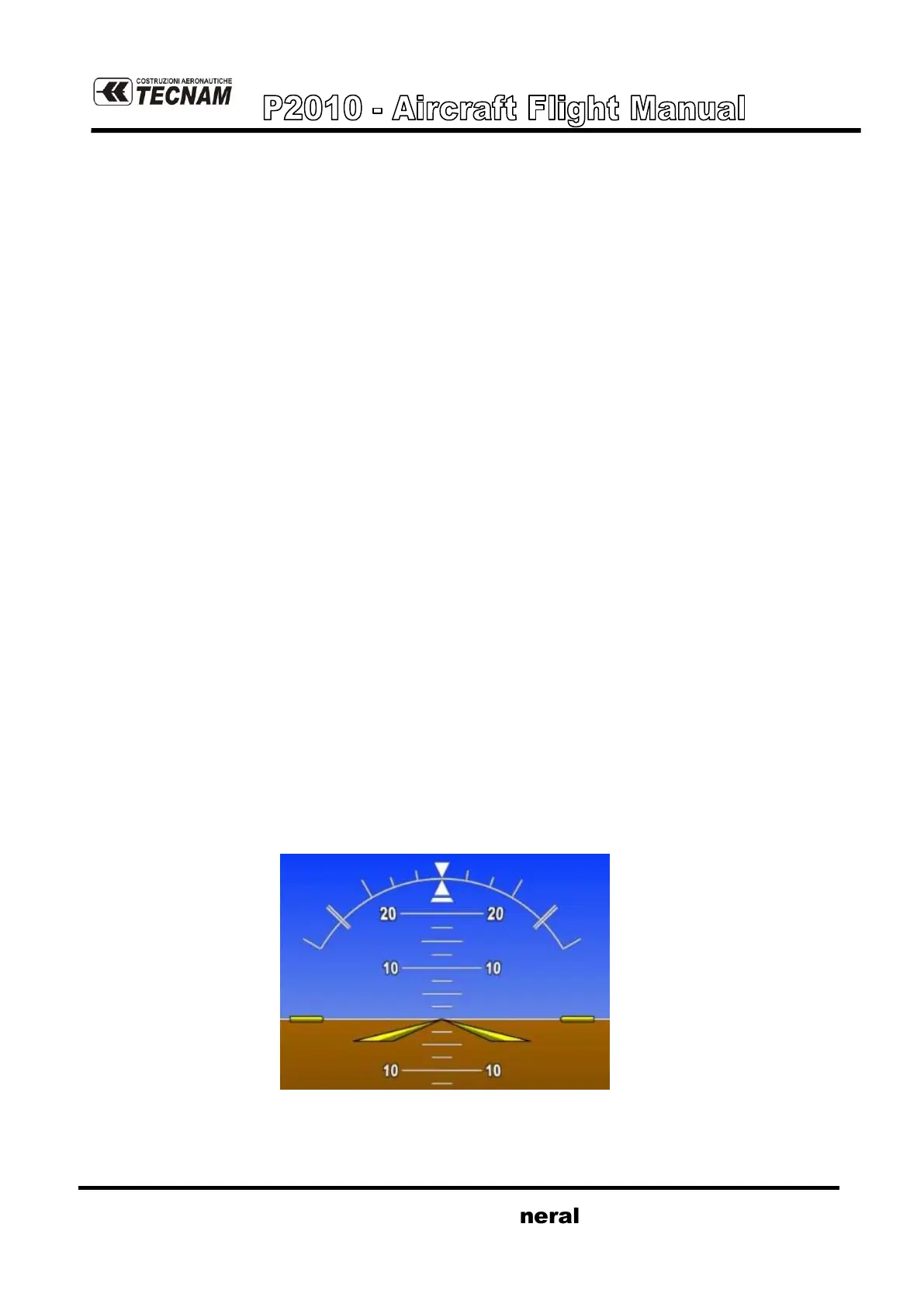
The engagement and disengagement attitude limits are displayed with double hash
marks on the roll indicator when ESP is available and /or active. The lack of dou-
ble hash marks above 200 ft AGL (when autopilot is not connected) is a clear in-
dication that ESP is not available.
Values for the symmetric roll attitude limits are as follows:
Engagement low threshold: +/- 45°
Engagement upper threshold: +/- 75°
Lower disengage threshold: +/- 30°
Electronic stability and protection action starts at the predetermined bank angle.
Since crossing this bank angle results in a change in aircraft stability (and there-
fore handling characteristics) indications of this boundary are provided to the pi-
lot.
When ESP is inactive (roll attitude within nominal limits) only the engagement
limits are displayed in order to reduce clutter on the roll indicator. As the bank