35
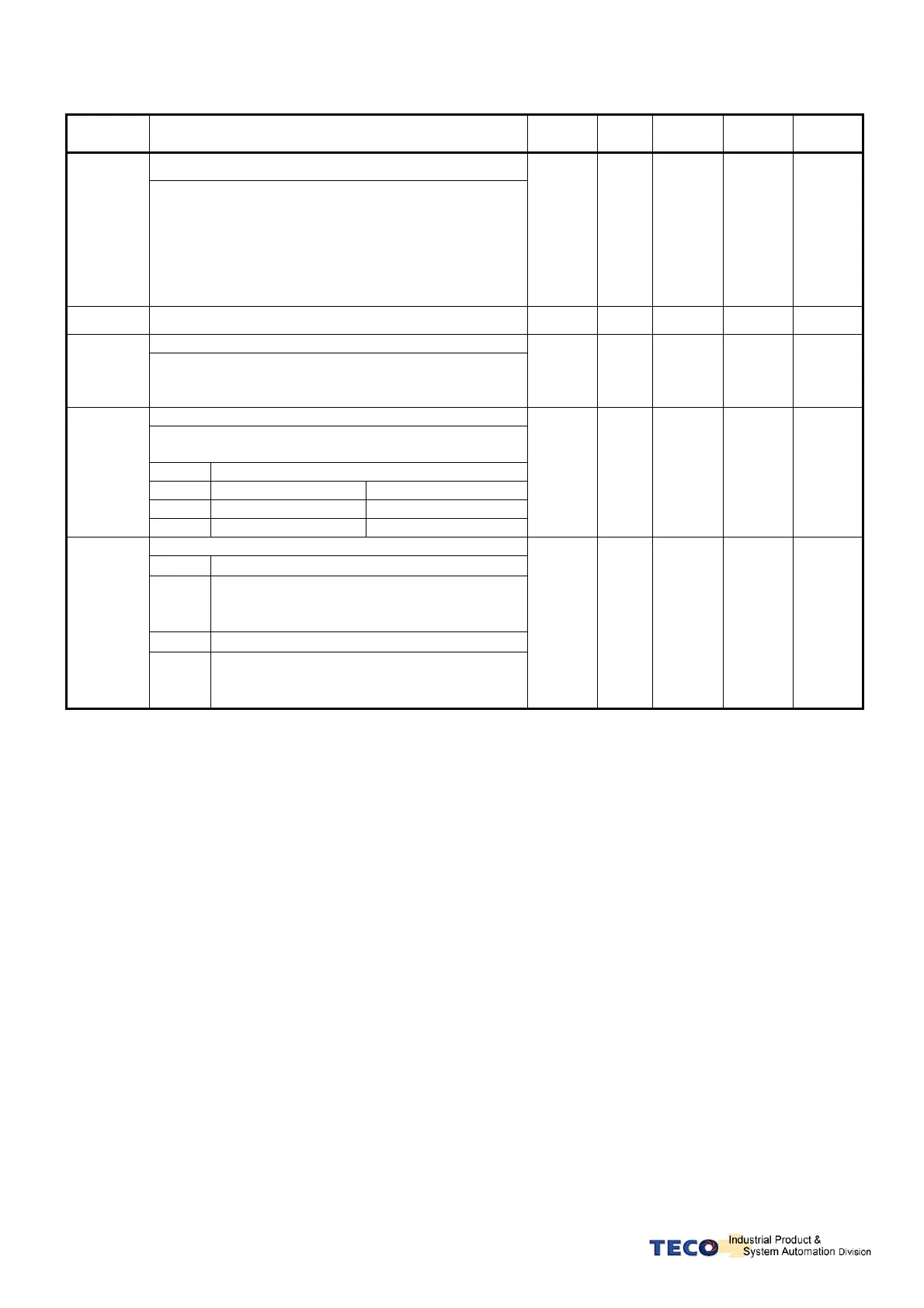
Parameter Name & Function Default Unit
Setting
Range
Control
Mode
Chapter
Encoder pulse output scale (Dividend)
★Cn005
For default set to the rated encoder number of pulses
per revolution, such as 2500ppr.
Encoder ppr can be scaled by setting a ppr in the range
of 1 to the rated ppr of the encoder for scaling purpose.
PPR = Pulse per revolution.
Ex:encorder rated precision is 2000 ppr, If you
setting Cn005 =2, the output is 1000ppr.
1 X
1
│
63
ALL 5-3-5
Cn006 Reserve parameter
─ ─ ─ ─ ─
Speed reached preset.
Cn007
Speed preset level for CW or CCW rotation.
When the speed is greater then preset level in Cn007
the Speed reached output signal INS will be activated..
Rated
rpm × 1/3
rpm
0
│
4500
S
T
5-3-12
Brake Mode
Selectable Brake modes for Servo off, EMC and
CCW/CW drive inhibit.
Setting Explanation
Dynamic brakes Mechanical brakes
0 No No
Cn008
1 No Yes
0 X
0
│
1
ALL 5-6-4
CW/CCW drive inhibit mode
Setting Explanation
0
When torque limit reached the setting value of
(Cn010, Cn011), servo motor deceleration to
stop in the zero clamp condition.
1 Reserve parameter
★Cn009
2
Once max torque limit (± 300% ) is detected
then deceleration to stop, zero clamp is
applied when stop.
0 X
0
│
2
ALL 5-6-6