38 HA0278T Rev H Dec 2016
Chapter 5
Jogs
Jogs are initiated by using the ‘Jog’ keys on the GUI panel (see Section 4.6.), or via
a jog handset connected to the unput logic pins exposed on the rear panel Control IO
connector (see Appendix A ).
Velocity Profile (specified in real world units, millimetres or degrees)
MaxVel - the maximum velocity at which to perform a jog
Accn/Dec - the ra te at which the ve locity climbs from m inimum to maximum, and
slows from maximum to minimum.
Note. The ‘Minimum Velocity’ is locked at zero and cannot be adjusted.
Operating Modes
Jogging - The way in which the motor moves when a jog command is received (i.e.
handset button pressed or GUI panel button clicked).
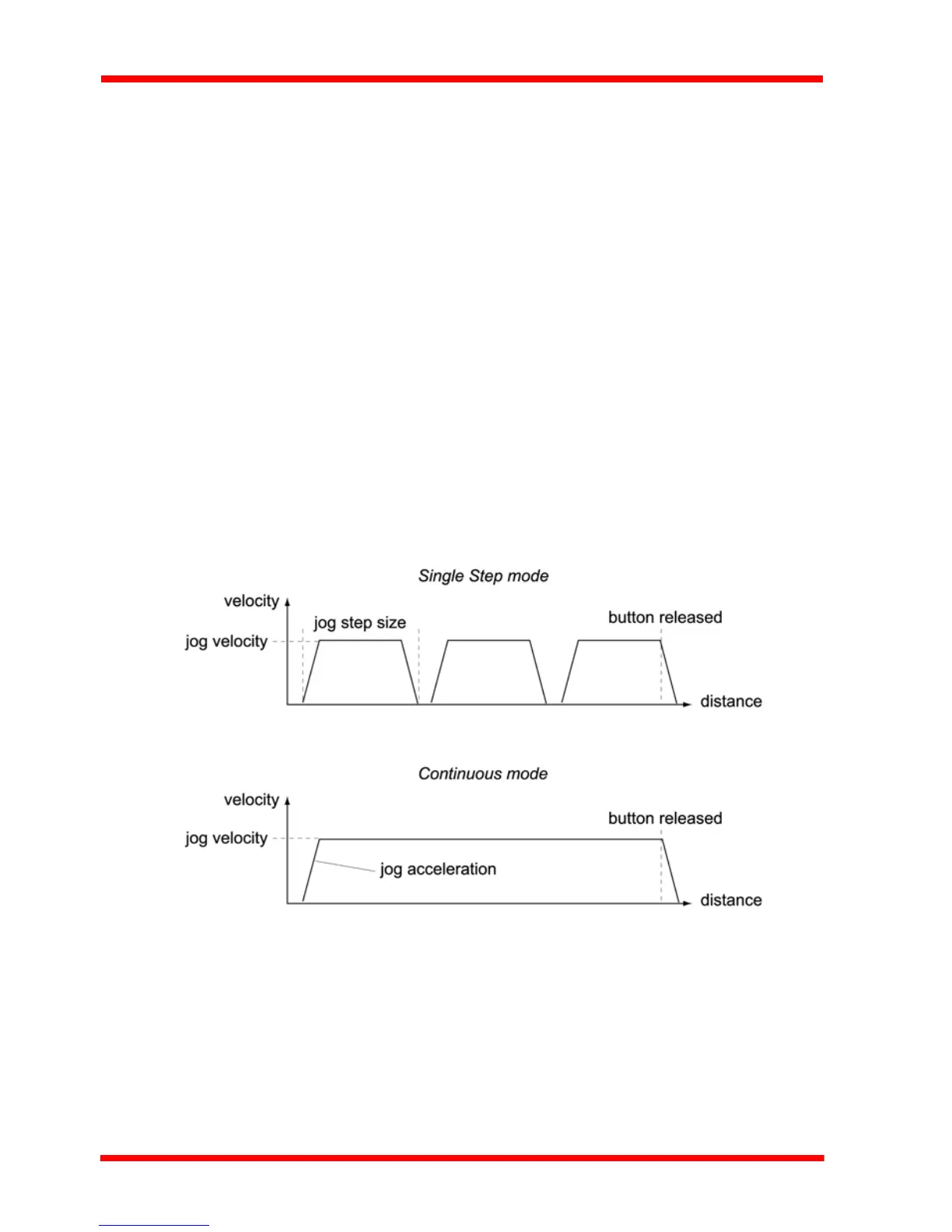
There are two jogging modes available, ‘Single Step’ and ‘Continuous’. In ‘Single
Step’ mode, the motor moves by the ste p size specifie d in the Ste p Distance
parameter. If the jog key is held down, single step jogging is repeated until the button
is released - see Fig. 5.3. In ‘Continuous’ mode, the motor actuator will accelerate and
move at the jog velocity while the button is held down..
Fig. 5.3 Jog Modes
Single Step - the motor moves by the step size specified in the Step Distance parameter.
Continuous - the motor continues to move until the jog signal is removed (i.e. jog
button is released).
Stopping - the way in which the jog motion stops when the demand is removed.
Immediate - the motor stops quickly, in a non-profiled manner
Profiled - th e motor stops in a profile d manner using the jog Velocity Profile
parameters set above.