TMQ AP4 Autopilot (AP4S10) 55 of 62 Version 4.96 9/10/2017
6. Check how well the boat is following the track. As only the
proportional value was adjusted at this stage, it has to have a small
overshoot;
7. Stop the boat and for eliminating the overshoot, increase the derivative
value (926), for example, to 6;
8. Try to follow a track again, and increase the derivative value if
necessary;
9. Now, when the boat is satisfactorily following the track in calm water,
take the boat to follow a track in a disturbed area, such as in a place
with tide current.
10. In the disturbed area, as the integral value (925) was not set yet, there
will be an offset between the course of the boat and the track line. Start
increasing the integral value. Don’t start with too high values, as it will
cause hunting around the track line, start with the value 4, for example.
Keep adjusting this value until the boat follows the track.
11. The system is adjusted at this time. It is a good practice to take note of
the values for each parameter for future maintenance.
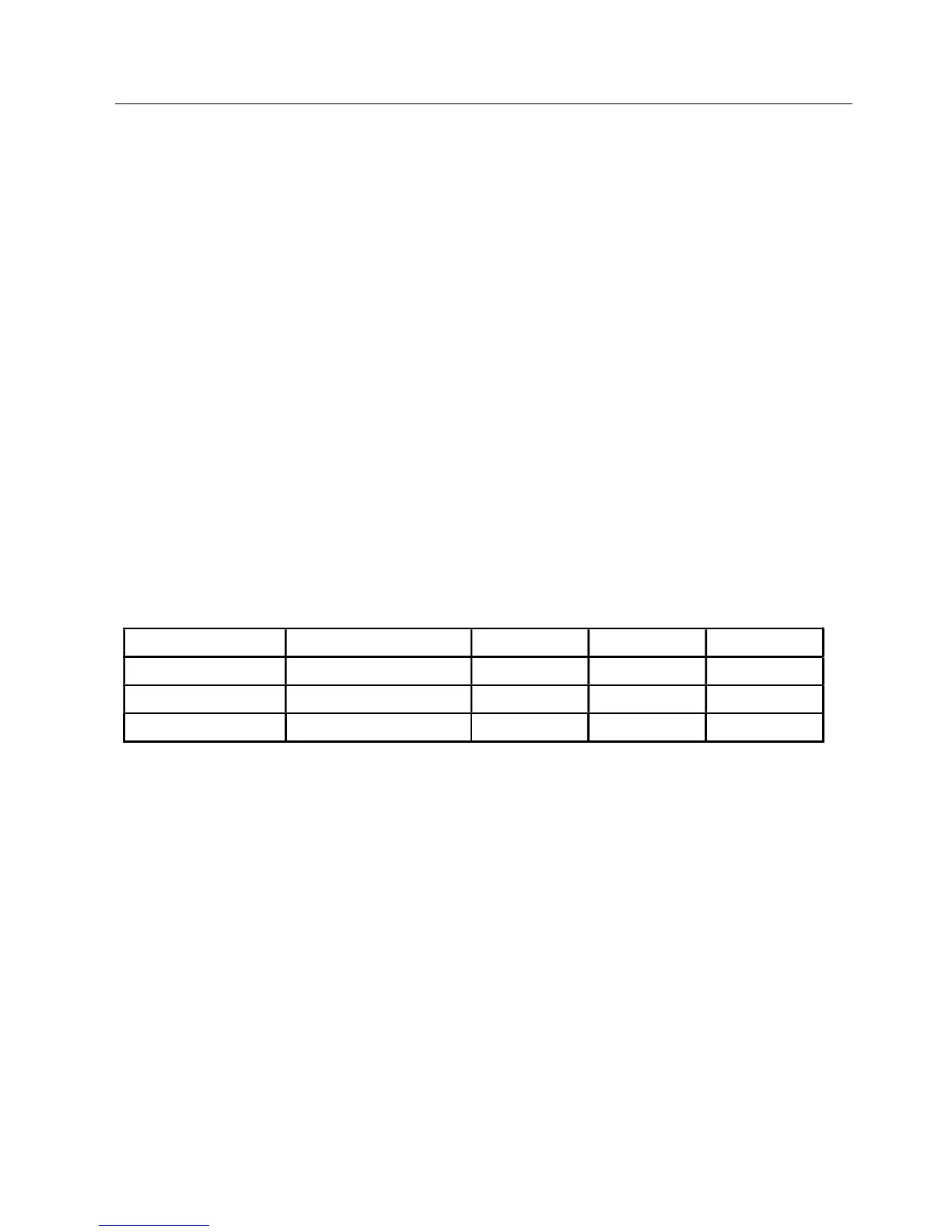
Real example:
Parameter Display selection
1st trial 2nd trial 3rd trial
Proportional 915 40 60 60
Integral 925 0 0 4
Derivative 926 6 10 10
1
st
trial:
The boat traced a proper curve for approaching to the track line but didn’t get
near enough, and took to long. The boat didn’t cross the line.
2
nd
trial:
The proportional gain was increased for getting more responsiveness. The
derivative was also increase for avoiding overshooting.
At the beginning the boat followed the track very well, but as expected, when it
reached a zone with tide currents, it left the track.
3
rd
trial:
For correcting the error occurred in the 2nd trial, it was necessary an offset on
the heading in order to compensate the tide currents. Therefore, the integral
gain (925) was increased until a good result was achieved in the middle of the
tide currents. Back to the calm waters, it kept on track as well.