– 118 –
c. The CONV connectors are of a solder cup type which joins cables by soldering.
For how to join cables to connectors and how to shield cables, see Appendix 2.
10.2 Attaching and Detaching Incremental Encoder Input Signal Cable
See the following for how to attach and detach the incremental encoder input signal
cables.
Be sure to turn off the controller before attaching/detaching the cables.
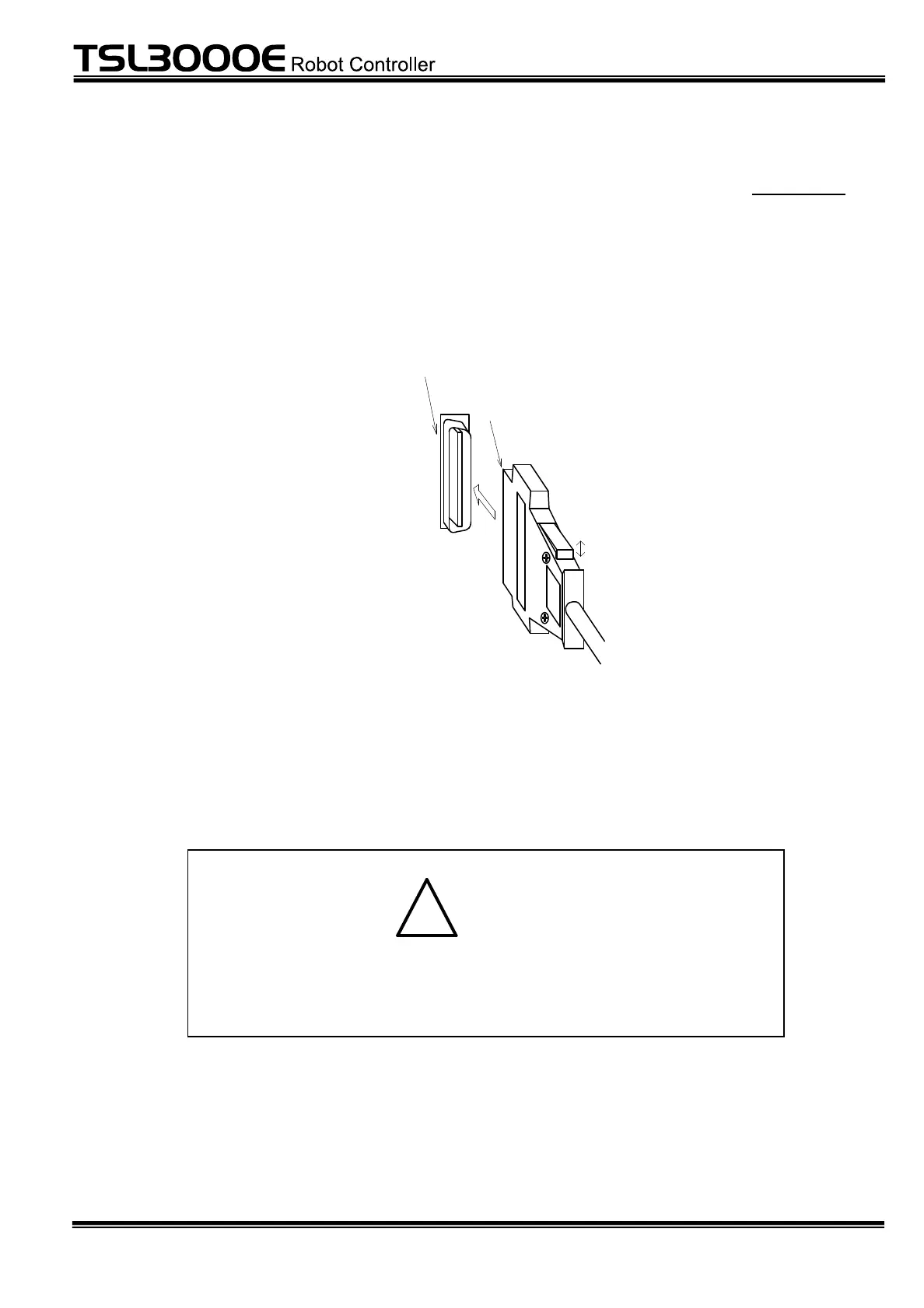
Push
Cable connector
Connector
Controller
connector
Fig. 10.3 Attaching and detaching incremental encoder input signal cable
To disconnect the cable, unlock and pull out the CONV connector.
At this time, DO NOT pull the cable instead of the connector. Otherwise, an
excessive force will be exerted on the cable, causing cable damage.
When attaching or detaching the cable, be sure to hold the
connector rather than the cable.
 Loading...
Loading...







