– 39 –
SAD-IN* ~ SAD-OUT* (Safety door contact inputs 1 and 2)
Between SAD-13 and SAD-14 (safety door contact input 1)
Between SAD-13 and SAD-14 (safety door stop contact input
2)
Signal judgment
Signal terminal
Used to emergency-stop the robot from the external
equipment.
While this signal is open, the processing of robot emergency
stop is executed.
Use this signal by connecting a safety device such as safety
door switch, photoelectric type sensing safety device and
safety mat switch.
When the emergency stop input contact is open, emergency
stop contact output is short-circuited between SAD-COM*
and SAD-*a.
Safety door contact output is c-contact. Use this signal in
accordance with the customer’s specifications.
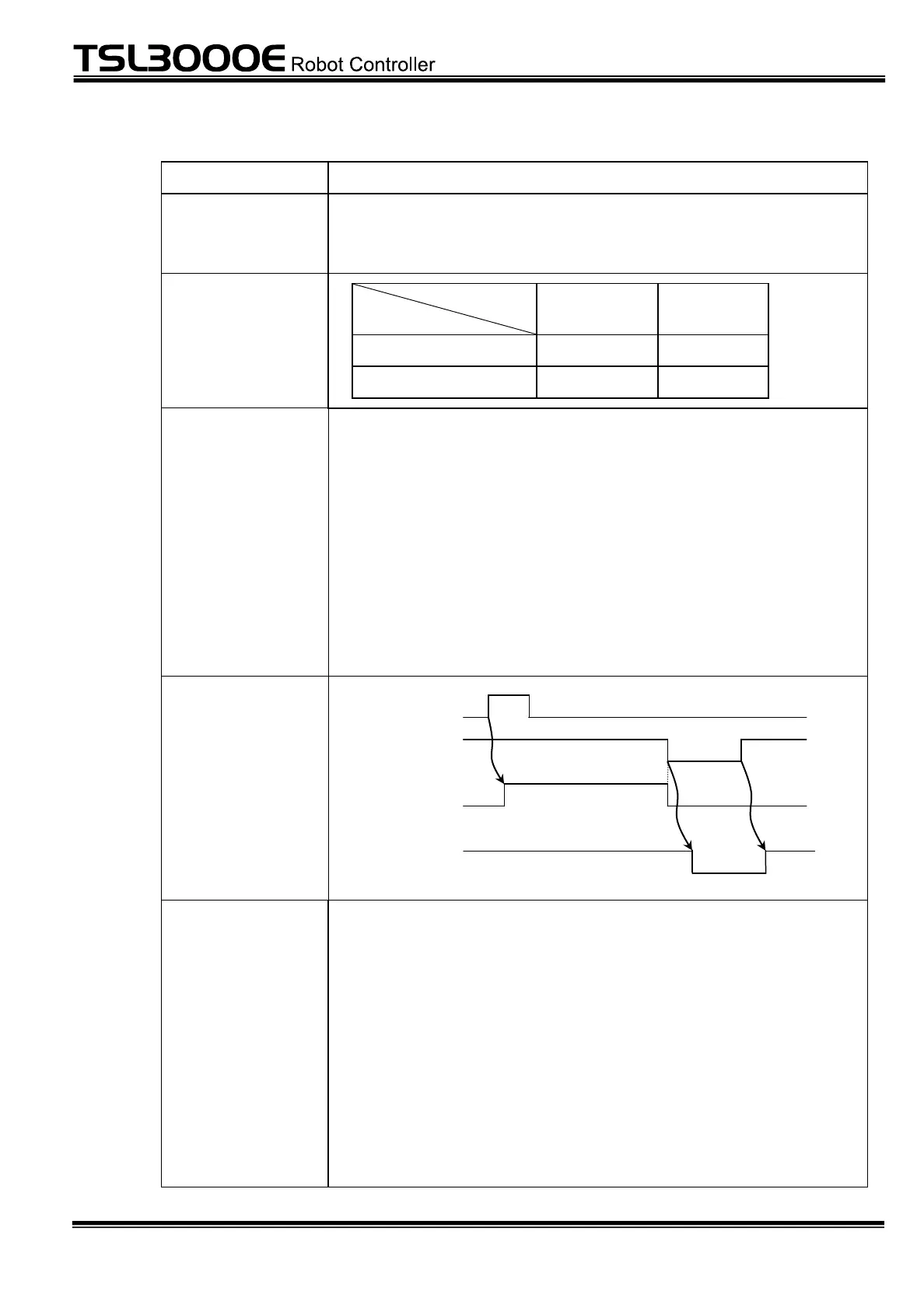
EX_SVON (I)
SAD-IN*
~ SAD-OUT* (I)
SVON-1a
~ SVON-COM (O)
SAD-COM*
~ SAD-*a (O)
1. While this signal is open, the servo power cannot be
turned on in any mode.
2. SAD-IN* to SAD-OUT* are assumed to have two (2) b
contacts interconnected, which should be turned on and
off at the same time. If there is a delay in contact input
operation, the non-conformity detection function of
hardware works to retain emergency stop.
If error clear is not done even after emergency stop
latch input, confirm whether this signal has two (2) b
inputs interconnected.
3. Unless this signal is used, short-circuit SAFE-13 to
SAFE-14 and SAFE-15 to SAFE-16.
 Loading...
Loading...







