Installation
4
- 21
Types of Mounting
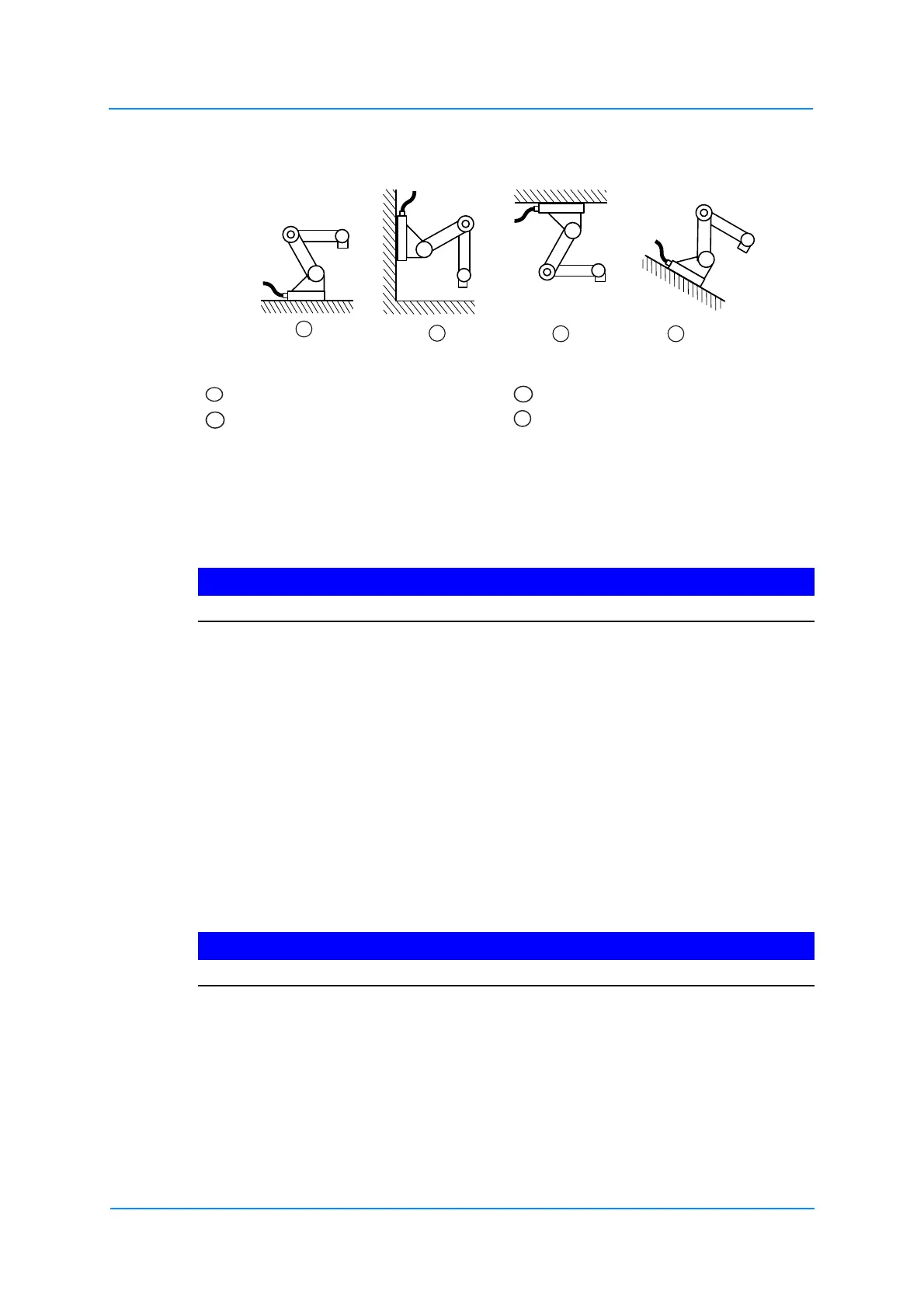
The robot can be mounted in the following positions:
Fig. 4-4: Types of Mounting
Suspended mounting
Suspended mounting differs from assembly in a standing position in the following points.
• S-axis working range
• Fixing the robot base
NOTICE
For suspended mounting in any position, please contact the local YASKAWA branch office.
S-axis working range
For the wall-mounted type, the S-axis movable range is ±30° (the range is adjusted prior to
the shipment).
B-Axis operating range
For ceiling-mounted type, the B-axis operating range is -90° to +135° (The range is
adjusted prior to the shipment).
Fastening the robot base
With suspended mounting, the robot must be fastened with 4 screws M16 (Strength
category 12.9). Use a torque of 400 Nm in tightening the screws.
Precaution against falling
In case of suspended mounting, take measures to prevent the robot from falling down.
NOTICE
If the setup is changed, please contact the local YASKAWA branch office.
0° = standing (standard) 180° = hanging from the ceiling
90°= hanging on the wall 10° - 90° = mounted on an angle
1
2
3
4
1
3
2
 Loading...
Loading...







